非線形解析コントロール パラメータ
非線形解析プロセスをコントロールする既定の設定を変更します。
Helius PFA は、複合材料構造の進行性破損シミュレーションの全体的な収束率と安定性を著しく向上させます。ただし、優れた収束特性を十分に利用するには、ANSYS によって使用される非線形解析プロセスを管理する既定の設定をいくつか変更する必要があります。このセクションでは、ANSYS によって使用される非線形解析プロセスを管理するパラメータに対して推奨される変更を行うために ANSYS Mechanical APDL を使用する方法について説明します。これらの変更は、NROPT、PRED、NSUBST、CNVTOL および NEQIT コマンドを使用して実行することができます。
SOLCONTROL コマンドがオン(既定)かオフかに関わらず、これらの非線形解析管理パラメータをオーバーライドする必要があります。
- NROPT
- NROPT コマンドには 2 つの目的があります。すなわち、a)「完全な」ニュートン-ラフソン アルゴリズムを使用するように ANSYS に指示し、b)解析プロセスを支援するために、ANSYS が Adaptive Descent アルゴリズムを使用しないようにすることです。NROPT コマンドは ANSYS のコマンド プロンプトからのみ指定することができます。以下の図は、このコマンドをコマンド プロンプトに入力する方法を示します。
 ANSYS では、非線形解析プロセスは、複合構造の非線形応答がグローバル レベルとローカル レベルの両方で十分にスムーズであるというニュートン-ラフソン アルゴリズムの基本的な仮定に基づいています。ただし、進行性破損シミュレーションにおける複合構造の非線形応答は、特にローカル レベルでは材料破損によって材料ヤング率が瞬時に減少するため、スムーズになりません。進行性破損シミュレーションにおいて収束を得ることが難しい主な原因は、この非スムーズな材料応答にあります。Helius PFA における材料の非線形性を管理する方法は、特にこの局所的な非スムーズの材料応答に対処するために設計されています。ただし、Helius PFA がシミュレーションの収束特性を改善できるよう、ANSYS の非線形解析コントロール パラメータの既定の設定を変更する必要があります。
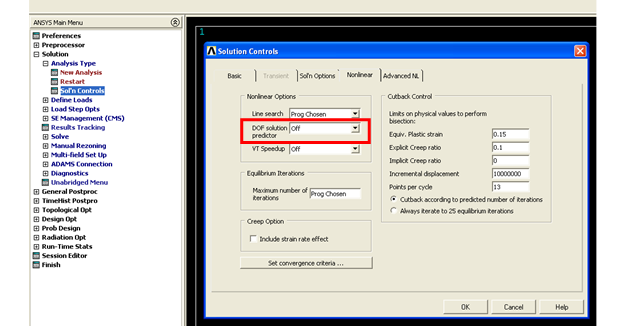
ANSYS では、非線形解析プロセスは、複合構造の非線形応答がグローバル レベルとローカル レベルの両方で十分にスムーズであるというニュートン-ラフソン アルゴリズムの基本的な仮定に基づいています。ただし、進行性破損シミュレーションにおける複合構造の非線形応答は、特にローカル レベルでは材料破損によって材料ヤング率が瞬時に減少するため、スムーズになりません。進行性破損シミュレーションにおいて収束を得ることが難しい主な原因は、この非スムーズな材料応答にあります。Helius PFA における材料の非線形性を管理する方法は、特にこの局所的な非スムーズの材料応答に対処するために設計されています。ただし、Helius PFA がシミュレーションの収束特性を改善できるよう、ANSYS の非線形解析コントロール パラメータの既定の設定を変更する必要があります。 - PRED
- NSUBST
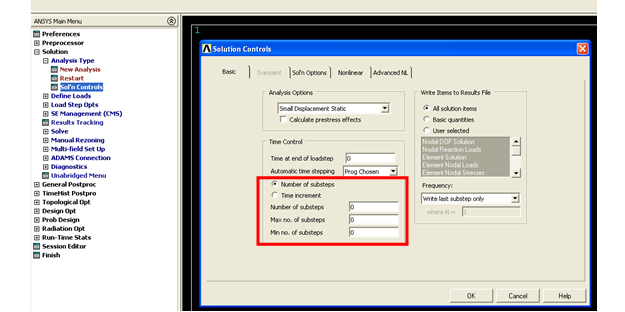
- NSUBST コマンドは、現在の荷重ステップに対するサブステップの最小および最大許容数を指定します。 オートデスクでは、最小値または最大値について特に推奨しません。これらの値はエンジニアリング上の判断に従ってください。ただし、サブステップごとに十分な平衡反復が許可される場合(NEQIT の項で説明)、Helius PFA は常に解の収束に到達します。これは、サブステップ サイズに対する複数のカットバックが必要となる典型的な非線形解析プロセスからの偏差です。Helius PFA はサイズに関係なく各サブステップで収束(ただしサブステップごとに十分な平衡反復が許可されていると仮定)するため、サブステップ サイズを決定する場合には注意が必要です。以下の図は、ANSYS Mechanical APDL 内でサブステップ数を指定する場所を示します。
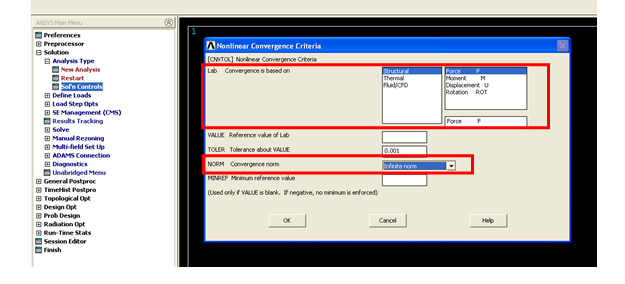
- CVNTOL
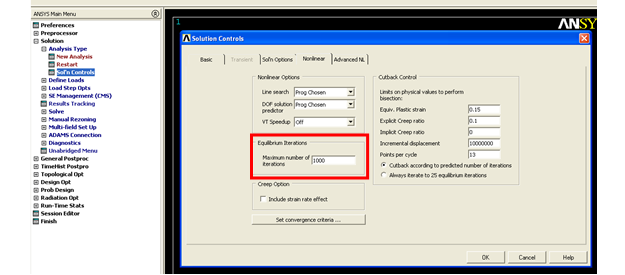
- NEQIT