部分的なオクルージョン
部分的なオクルージョンは、ノイズを生成したりまたはマーカーの位置を間違って認識することがあります。これは、パフォーマの体の上にあるセンサーが別のセンサーと近づきすぎたとき、またはセンサーが部分的に複数のカメラのうち 1 台から隠されたときに生じます。
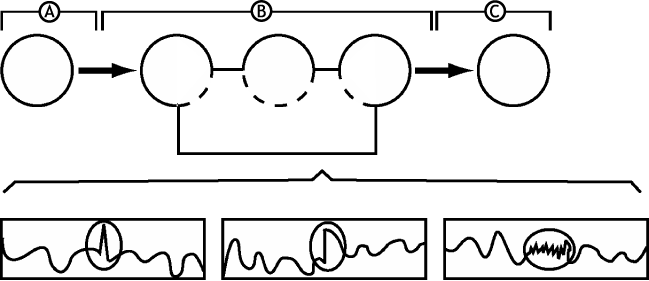
A.センサーは正しく追跡され、記録されている。 B.センサーは部分的に覆い隠されている。 C.センサーは正しく追跡されている。
上の図(B)のように、部分的に覆い隠されたセンサーによって生成されたデータを検証する場合、ピーク、シフト、またはノイズを見つけることがあります。これらは一般的に、センサーが完全に覆い隠される寸前に見ることができます。
これらの場合、データ セグメントでノイズの多い部分の両側ではデータに問題はありません。したがって、ファンクション カーブのノイズの多い部分だけを整えて、両側の正しいデータを維持する方法が必要となります。
Optical ツールは、データ セグメントを 2 つのセグメントに分割できるため、次の図のように、残したいデータを保ったままノイズ部分を破棄することができます。
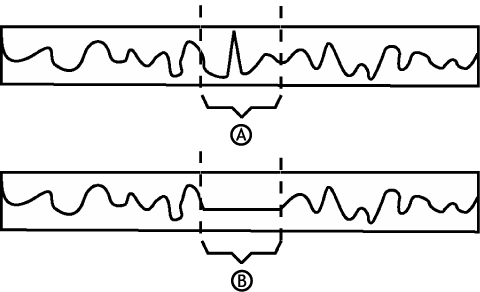
A.アーティファクトがあるが、それ以外は正しいカーブ。B.アーティファクトは取り除かれ、ギャップはデータ セグメント間を補間して埋められている。
アーティファクト(不自然なデータ エフェクト)を見つけるためには、マーカーが正常でない動きを始めた部分のデータ セグメントを慎重に分析することが要求されます。遅い速度でそのテイクを再生する方法が、マーカーが横滑り、ジャンプ、またはシフトを開始した部分を見つけるのに適した方法です。