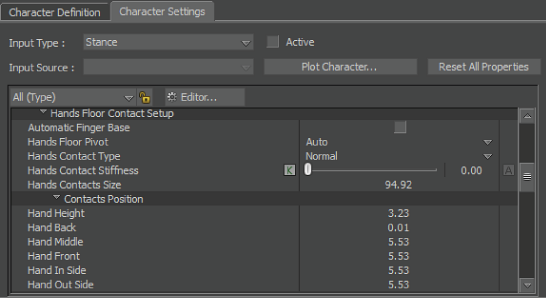
Hands Floor Contact Setup プロパティ
Floor Contacts キャラクタ プロパティ グループの Hands Floor Contact Setup フォルダでは、両手がフロアに接触する仕方を調整することができます。
Automatic Finger Base
手を修正しますが、指の根元は操作することができません。このオプションは、キャラクタを作成するとき、それぞれの指の根元を手動で操作、アニメートできるように、既定では無効にされています。
Automatic Finger Base がオンのとき、指の根元をアニメートすることはできませんが、フロアとの接触による結果としての位置にキーフレームを設定することはできます。
それぞれの手の指の根元によるソルバを最大限に利用するには、モデルのスケルトンを作成するとき、指の根元をそれぞれの指のペアレントとして設定することを推奨します。親指は手首の子にする必要があります。
Hands Floor Pivot メニュー
手がフロアと接触した場合、ピボットとして扱う手の部分を定義できます。Hands Floor Pivot には次の表で説明する 3 つのオプションがあります。
| オプション | 動作 |
|---|---|
| Auto | 既定のオプションで、手首と指の優先順位を等しくします。手がフロアと接触した場合、手首は後方に移動させられ、指は前に押されます。 |
| Wrist | 手首に優先順位を与え、手首を手のフロア コンタクトの回転軸ポイントとして定義します。指がフロアと接触した場合、床定数に対する手首の軌跡を保つために指は前に移動させられます。 |
| Fingers | 指に優先順位を与え、指を回転軸ポイントとして定義します。指がフロアと接触した場合、指をフロアにしっかり置くために手首は後方に移動させられます。 |
Hands Contact Type
キャラクタの両手とフロアとの接触を定義するために使用するマーカーの数と方向を定義できます。次の表で、使用可能な手の接触タイプについて説明します。
| オプション | 動作 |
|---|---|
| Normal | 6 個のマーカーがそれぞれの手のフロア コンタクトを定義します。中間のマーカーが指の付け根の位置を定義します。 |
| Wrist | 4 個の点がそれぞれの手のフロア コンタクトを定義します。手のマーカーは、それぞれの手の平の周囲に表示されます。 |
| FingerBase | 4 個の点がそれぞれの手のフロア コンタクトを定義します。手のフロア コンタクト マーカーは、それぞれの手の指の周囲に表示されます。 |
| Hoof | 4 個の点がそれぞれの手のフロア コンタクトを定義しますが、その点は 90°の角度を向いているため、馬などの蹄を持った動物タイプに対するフロア コンタクトを定義します。これらのコンタクト マーカーは 180°の移動ができます。 |
Hands Contact Stiffness
手のどのような部分でもフロアと接触したとたんに、手がどの程度の早さでどの程度こわばるのかを定義します。
たとえば、MotionBuilder の既定設定を使用し、Hands Contact Stiffness だけを 100% に調整すると、指がフロアに触れたとたんに手は動きを停止します。50% にすると、フロアと触れた後でも手は徐々に移動します。
Hands Contacts Size
手の輪郭を示すコンタクト マーカーの大きさを変更します。コンタクト マーカーの中央は、フロア コンタクトで使用するポイントです。Hands Contacts Size を大きくすることは、フロアとのコンタクト マーカーをより大きくするだけで、手がフロアと接触したときの動きには影響を与えません。両手と両足のコンタクト マーカーを表示させるにはCharacter Controls ウィンドウから ![]() > Show/Hide > Floor Contact を選択します。
> Show/Hide > Floor Contact を選択します。
Contacts Position
Contacts Position フォルダ内のそれぞれの設定では、両手のコンタクト領域を数値で定義します。Viewer ウィンドウで Hand Floor Contacts を選択して移動することによって、その領域を変更することもできます。
Contacts Position フォルダおよび設定
それぞれの Hand Contacts Position 設定は、手のコンタクト領域の異なる側面を定義します。次の表に、これらの設定を説明します。
| 設定 | 説明 |
|---|---|
| Hand Height | モデルの手の一番低い位置を定義します。すべてのマーカーがモデルの手の一番低い位置にくるまで、この設定を変更します。 |
| Hand Back | モデルの手の裏側の端を定義します。裏側マーカーが手の裏側にくるまで、この設定を変更します。 |
| Hand Middle | 指が曲がる部分である、手の中央の位置を定義します。中央マーカーが指の曲がる位置にくるまで、この設定を調整します。 |
| Hand Front | モデルの手の前部分を定義します。マーカーが手の前部にくるまで、この設定を変更します。 |
| Hand In Side | モデルの手の内側を定義します。マーカーが手の内側にくるまで、この設定を調整します。 |
| Hand Out Side | モデルの手の外側を定義します。マーカーが手の外側にくるまで、この設定を変更します。 |
手の大きさを調整する際、Right カメラ ビューを使用して、Hand In Side と Hand Out Side を除く、すべての大きさについてシーンを確認してください。Hand In Side と Hand Out Side の大きさは、Front カメラ ビューで表示させます。モデルを透視して見るには、X-Ray 表示モードに切り替えます。