입력 데이터:
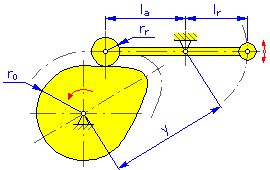
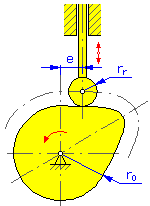
- 기본 반지름 r 0 (디스크 및 원통형 캠)
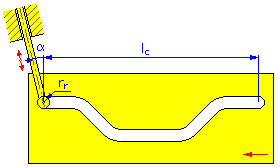
- 동작 길이 l c (선형 캠)
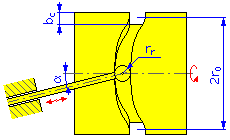
- 캠 폭 b c
- 롤러 반지름 r r
- 롤러 폭 b r (종동륜 쉐이프 원통의 경우)
- 편심률 e(종동륜 변환용 디스크 캠)
- 편심 각도 α(종동륜 변환용 선형 및 원통형 캠)
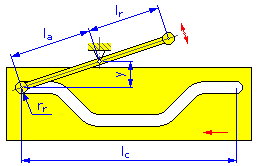
- 피벗 거리 y(스윙 암용 디스크 및 선형 캠)
- 암 길이 l a (스윙 암용 디스크 및 선형 캠)
- 반작용 암 l r (스윙 암용 디스크 및 선형 캠)
- 속도 ω(디스크 및 원통형 캠)
- 속도 v(선형 캠)
- 롤러에 작용하는 힘 F
- 가속된 무게 m
- 스프링 정격 c
- 허용 압력 p A1
- 캠 재질의 탄성 계수 E 1
- 캠 재질의 프와송의 비 μ 1
- 허용 압력 p A2
- 종동륜 재질의 탄성 계수 E 2
- 종동륜 재질의 프와송의 비 μ 2
|
디스크 캠 |
|
|
|
|
|
선형 캠 |
|
|
|
|
|
원통형 캠 |
|
 |
|
|
외부 지름 = 2r 0 + b c |
|
|
내부 지름 = 2r 0 - b c |
|
캠 세그먼트
- 동작 함수 f y (z) [ul]
- 반전 비율 k r (선형 부품이 있는 포물선형 및 동작 포물선형만 해당)
- 선형 부품 k l (선형 부품이 있는 동작 포물선형만 해당)
- 동작 시작 위치 l 0 [°; mm, in]
- 동작 끝 위치 l [°; mm, in]
- 세그먼트 동작 길이 dl = l - l 0 [°; mm, in]
- 시작에서 리프트 h 0 [mm, in]
- 끝에서 리프트 h max [mm, in]
- 세그먼트 리프트 d h = h max - h 0 [mm, in]
리프트 종속성
디스크 및 원통형 캠
캠 회전 각도 ϕ i [도]
세그먼트의 실제 상대적 위치: z i = (ϕ i - l 0 ) / dl (범위 0 - 1)
|
리프트 |
y i = dh f y (z) [mm, in] |
|
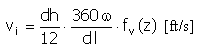
속도 |
|
|
|
|
|
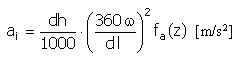
가속도 |
|
|
|
|
|
펄스 |
|
|
|
선형 캠
캠 동작 위치 l i [mm, in]
세그먼트의 실제 상대적 위치: z i = (l i - l 0 ) / dl (범위 0 - 1)
|
리프트 |
y i = dh f y (z) [mm, in] |
|
속도 |
|
|
가속도 |
|
|
|
|
|
펄스 |
|
|
|
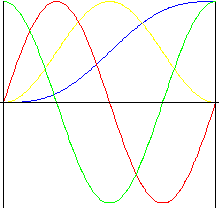
동작 함수
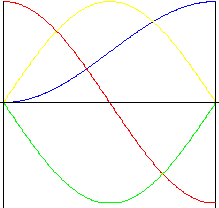
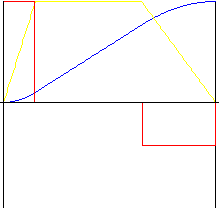
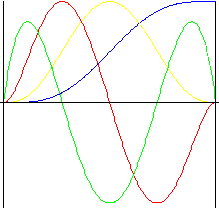
원형(확장 sinusoidal)
이 동작에는 뛰어난 가속도 특성이 있습니다. 소음, 진동 및 마모 수준이 낮기 때문에 주로 고속 캠에 사용됩니다.
|
|
리프트 |
|
|
속도 |
|
|
가속도 |
|
|
펄스 |
|
리프트 |
f y (z) = z - 0.5/π sin(2πz) |
|
속도 |
f v (z) = 1 - cos (2πz) |
|
가속도 |
f a (z) = 2π sin(2πz) |
|
펄스 |
f j (z) = 4π 2 cos(2πz) |
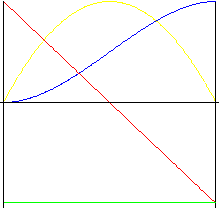
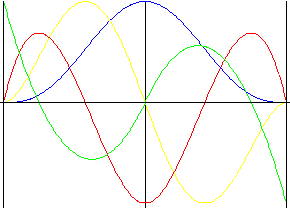
파형(sinusoidal)
이 곡선 고유의 장점은 스트로크 중 속도 및 가속도에서 부드럽게 나타나는 것입니다. 그러나 동작 시작 및 종료 시 가속도의 순간적인 변화로 인해 소음, 진동 및 마모가 생길 수 있습니다.
|
|
리프트 |
|
|
속도 |
|
|
가속도 |
|
|
펄스 |
|
리프트 |
f y (z) = 0.5 (1 - cos πz)) |
|
속도 |
f v (z) = 0.5 π sin (πz) |
|
가속도 |
f a (z) = 0.5 π 2 cos(πz) |
|
펄스 |
f j (z) = -0.5π 3 sin(πz) |
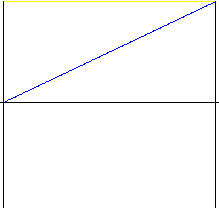
단위
동작 시작 및 종료 시 충격이 큰 간단한 동작입니다. 극히 단순한 장치를 제외하고 거의 사용되지 않습니다. 동작 시작 및 종료가 수정된, 즉 선형 부품이 있는 포물선형 동작을 사용하는 것이 좋습니다.
|
|
리프트 |
|
|
속도 |
|
리프트 |
f y (z) = z |
|
속도 |
f v (z) = 1 |
|
가속도 |
f a (z) = 0 |
|
주: z = 0 및 z = 1인 경우 적절한 값은 무한 값이어야 하지만 계산에서는 무한 값을 사용할 수 없으므로 영(0)을 사용합니다.
|
|
|
펄스 |
f j (z) = 0 |
|
주: z = 0 및 z = 1인 경우 적절한 값은 무한 값이어야 하지만 계산에서는 무한 값을 사용할 수 없으므로 영(0)을 사용합니다.
|
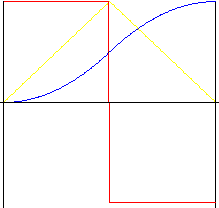
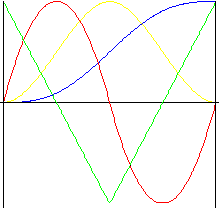
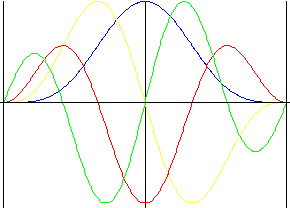
포물선형(2차 다항식)
가능한 한 가장 작은 가속도가 있는 동작입니다. 그러나 동작 시작, 중간 및 종료 시 갑작스러운 가속도의 변화로 인해 충격이 생길 수 있습니다. 반전비는 가속도 및 감속도 비율을 변경할 수 있도록 동작 중간에 "늘이기"를 허용합니다.
대칭형(반전비 k r = 0.5)
|
|
리프트 |
|
|
속도 |
|
|
가속도 |
|
z = 0~0.5인 경우: |
|||
|
리프트 |
fy(z) = 2z 2 |
||
|
속도 |
fv(z) = 4z |
||
|
가속도 |
fa (z) = 4 |
||
|
펄스 |
fa(z) = 0 |
||
|
z = 0.5~1인 경우: |
|||
|
리프트 |
fy(z) = 1 - 2(1 - z) 2 |
||
|
속도 |
fv(z) = 4 (1 - z) |
||
|
가속도 |
fa (z) = -4 |
||
|
펄스 |
fj(z) = 0 |
||
|
주: z = 0 및 z = 1인 경우 적절한 값은 무한 값이어야 하지만 계산에서는 무한 값을 사용할 수 없으므로 영(0)을 사용합니다.
|
|||
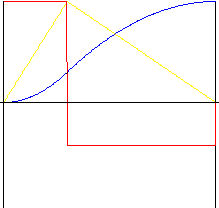
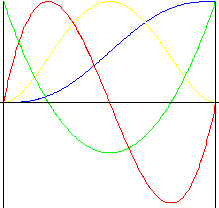
비대칭형
k r - 반전비(범위 0.01~0.99)
|
|
리프트 |
|
|
속도 |
|
|
가속도 |
|
z = 0 to k r 인 경우: |
|||
|
리프트 |
f y (z) = z 2 / k r |
||
|
속도 |
f v (z) = 2z / k r |
||
|
가속도 |
f a (z) = 2 / k r |
||
|
펄스 |
f j (z) = 0 |
||
|
z = k r to 1의 경우: |
|||
|
리프트 |
f y (z) = 1 – (1 – z) 2 / (1 – k r ) |
||
|
속도 |
f v (z) = 2 (1 – z) / (1 – k r ) |
||
|
가속도 |
f a (z) = -2 / (1 - k r ) |
||
|
펄스 |
f j (z) = 0 |
||
|
주: z = 0 및 z = 1인 경우 적절한 값은 무한 값이어야 하지만 계산에서는 무한 값을 사용할 수 없으므로 영(0)을 사용합니다.
|
|||
선형 부품이 있는 포물선형
선형 동작보다 적합한 가속도 및 감속도를 제공합니다. 반전비는 가속도 및 감속도 비율을 변경할 수 있도록 동작 중간에 "늘이기"를 허용합니다. 선형 부품 비율을 사용하여 선형 동작 부품의 상대적 크기를 설정할 수 있습니다.
|
|
속도 |
|
|
가속도 |
|
|
펄스 |
k r - 반전비(범위 0.01~0.99)
k l - 선형 부품 비율(범위 0~0.99)
k z = 1 + k l / (1 - k l )
k h = (1 - k l ) / (1 + k l )
|
z = 0 to k r / k z 의 경우: |
|||
|
리프트 |
f y (z) = k h z 2 k z 2 / k r |
||
|
속도 |
f v (z) = 2 k h z k z 2 / k r |
||
|
가속도 |
f a (z) = 2 k h k z 2 / k r |
||
|
펄스 |
f j (z) = 0 |
||
|
z = k r / k z to r / k z + k l 의 경우: |
|||
|
리프트 |
f y (z) = (z - 0.5 k r / k z ) 2 / (1 + k l ) |
||
|
속도 |
f v (z) = 2 / (1 + k l ) |
||
|
가속도 |
f a (z) = 0 |
||
|
펄스 |
f j (z) = 0 |
||
|
z = k r / k z + k l to 1의 경우: |
|||
|
리프트 |
f y (z) = 1 - k h (1 - z) 2 k z 2 / (1 - k r ) |
||
|
속도 |
f v (z) = 2 k h (1 - z) k z 2 / (1 - k r ) |
||
|
가속도 |
f a (z) = -2 k h k z 2 / (1 - k r ) |
||
|
펄스 |
f j (z) = 0 |
||
3차 다항식(3차 포물선)
포물선형 동작보다 충격이 작은 동작입니다.
|
|
리프트 |
|
|
속도 |
|
|
가속도 |
|
|
펄스 |
|
리프트 |
f y (z) = (3 -2z) z 2 |
|
속도 |
f v (z) = (6 - 6z) z |
|
가속도 |
f a (z) = 6 - 12z |
|
펄스 |
f j (z) = -12 |
4차 다항식
3차 다항식 동작보다 충격이 작은 동작입니다.
|
|
리프트 |
|
|
속도 |
|
|
가속도 |
|
|
펄스 |
|
z = 0 - 0.5인 경우 |
||
|
리프트 |
f y (z) = (1 - z) 8z 3 |
|
|
속도 |
f v (z) = (24 - 32z) z 2 |
|
|
가속도 |
f a (z) = (48 - 96z) z |
|
|
펄스 |
f j (z) = 48 - 192z |
|
|
z = 0.5~1인 경우: |
||
|
리프트 |
f y (z) = 1 - 8z (1 - z) 3 |
|
|
속도 |
f v (z) = (32z - 8) (1 - z) 2 |
|
|
가속도 |
f a (z) = (48 - 96z) (1 - z) |
|
|
펄스 |
f j (z) = 194z - 144 |
|
5차 다항식
3차 다항식 동작보다 충격이 작은 동작입니다.
|
|
리프트 |
|
|
속도 |
|
|
가속도 |
|
|
펄스 |
|
리프트 |
f y (z) = (6z 2 - 15z + 10) z 3 |
|
속도 |
f v (z) = (z 2 - 2z + 1) 30z 2 |
|
가속도 |
f a (z) = (2z 2 - 3z + 1) 60z |
|
펄스 |
f j (z) = (6z 2 - 6z + 1) 60 |
7차 다항식
펄스를 포함하여 모든 공식에서 부드럽게 나타납니다.
|
|
리프트 |
|
|
속도 |
|
|
가속도 |
|
|
펄스 |
|
리프트 |
f y (z) = (-20z 3 + 70z 2 - 84z + 35) z 4 |
|
속도 |
f v (z) = (-z 3 + 3z 2 - 3z + 1) 140z 3 |
|
가속도 |
f a (z) = (-2z 3 + 5z 2 - 4z + 1) 420z 2 |
|
펄스 |
f j (z) = (-5z 3 + 10z 2 - 6z + 1) 840z |
5차 비대칭 다항식
5차 다항식과 비슷하지만 강제 리프트 반전이 있습니다.
|
|
리프트 |
|
|
속도 |
|
|
가속도 |
|
|
펄스 |
|
부품 1 |
||
|
리프트 |
f y (z) = 1 - (8 (1 - z) 3 - 15 (1 - z) 2 + 10) (1 - z) 2 / 3 |
|
|
속도 |
f v (z) = (2 (1 - z) 3 - 3 (1 - z) 2 + 1) (1 - z) 20 / 3 |
|
|
가속도 |
f a (z) = -(8 (1 - z) 3 - 9 (1 - z) 2 + 1) 20 / 3 |
|
|
펄스 |
f j (z) = (4 (1 - z) 2 - 3 (1 - z)) 40 |
|
|
부품 2 |
||
|
리프트 |
f y (z) = (8z 3 - 15z 2 + 10) z 2 / 3 |
|
|
속도 |
f v (z) = (2z 3 - 3z 2 + 1) z 20/3 |
|
|
가속도 |
f a (z) = (8z 3 - 9z 2 + 1) 20/3 |
|
|
펄스 |
f j (z) = (4z 2 - 3z) 40 |
|
이중 파형
강제 리프트 반전이 있는 펄스를 포함하여 모든 공식에서 부드럽게 나타납니다.
|
부품 1 |
||
|
리프트 |
f y (z) = cos(0.5π (1 - z)) 4 |
|
|
속도 |
f v (z) = π (0.5 sin(πz) - 0.25 sin(2πz)) |
|
|
가속도 |
f a (z) = 0.5 π 2 (cos(πz) - cos(2πz)) |
|
|
펄스 |
f j (z) = π 3 (-0.5 sin(πz) + sin(2πz)) |
|
|
부품 2 |
||
|
리프트 |
f y (z) = 1 - cos(0.5π z) 4 |
|
|
속도 |
f v (z) = π (0.5 sin(πz) + 0.25 sin(2πz)) |
|
|
가속도 |
f a (z) = 0.5 π 2 (cos(πz) + cos(2πz)) |
|
|
펄스 |
f j (z) = -π 3 (0.5 sin(πz) + sin(2πz)) |
|
최대 상대 값 비교
|
동작 |
속도 |
가속도 |
펄스 |
|
원형(확장 sinusoidal) |
2 |
6.28 |
39.5 |
|
파형(sinusoidal) |
1.57 |
4.93 |
15.5 |
|
단위 |
1 |
∞ |
∞ |
|
포물선형(2차 다항식) |
2 |
4 |
∞ |
|
3차 다항식 |
1.5 |
6 |
12 |
|
4차 다항식 |
2 |
6 |
48 |
|
5차 다항식 |
1.88 |
5.77 |
60 |
|
7차 다항식 |
2.19 |
7.51 |
52.5 |
|
비대칭 5차 다항식 |
1.73 |
6.67 |
40 |
|
이중 파형 |
2.04 |
9.87 |
42.4 |
기타 종속성
롤러 힘
|
F i = F + m a i + c y i [N, lb] |
법선력
|
Fn i = F i / cos(γ i ) [N, lb] |
모멘트
|
T i = F i r i tan (γ i ) [Nmm, lb in] |
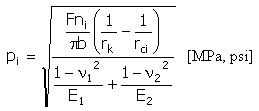
고유(헤르츠) 압력
|
|
|
|
b = min (b v, b k ) |