XR 개선 사항 및 향상된 기능
VRED 2022에는 Varjo MR 마커 배치 및 기본 설정, 손 제스처, 손 깊이 예측과 함께 VR 메뉴를 통해 XR 및 VR에서 즉시 사용 가능한 객체 배치 기능이 추가되었습니다. 또한 마커 트래킹의 사용자 지정 버전을 구현하기 위한 Python 인터페이스에 대한 함수도 추가되었습니다. 이러한 함수는 vrImmersiveInteractionService 문서에서 찾을 수 있습니다.
Varjo 마커
Varjo XR HMD 사용자에게만 제공됩니다.
 혼합 현실 장면에서 객체 배치가 쉽도록 원점 마커라고 하는 표시 마커를 사용할 수 있습니다. 좌표계가 자동으로 동기화되지만 MR을 시작하기 전에 노드가 준비되어야 합니다.
혼합 현실 장면에서 객체 배치가 쉽도록 원점 마커라고 하는 표시 마커를 사용할 수 있습니다. 좌표계가 자동으로 동기화되지만 MR을 시작하기 전에 노드가 준비되어야 합니다.
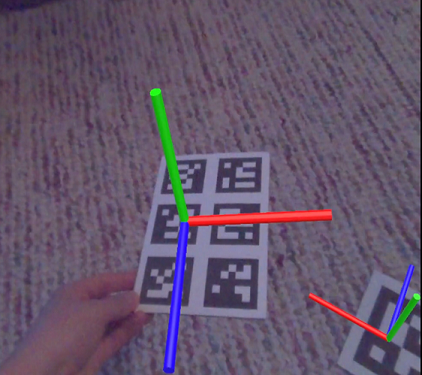
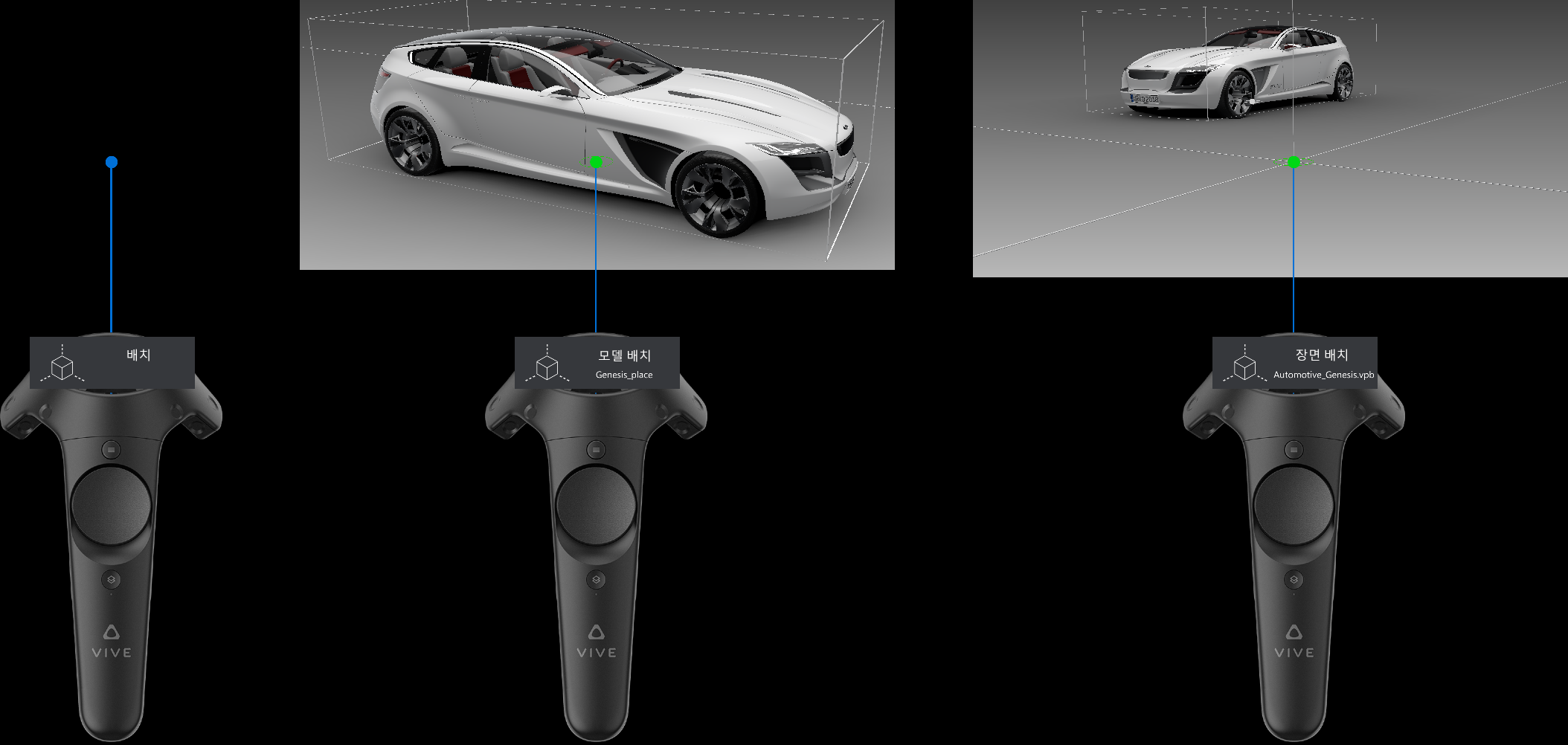
지원되는 HMD에서 마커를 감지할 수 있도록 하려면 VR 메뉴에서  을 사용하십시오. HMD가 마커를 인식한 후 노드에
을 사용하십시오. HMD가 마커를 인식한 후 노드에 VarjoMarker라는 태그가 지정되면 노드 컨텐츠가 해당 마커의 위치로 이동됩니다. 마커의 ID 번호는 별도의 태그로 설정해야 합니다.
태그 구문은 대/소문자를 구분합니다.
여러 마커를 단일 마커로 결합할 수 있습니다. 그러면 트래킹 안정성이 향상됩니다.
예를 들어 여러 노드에 VarjoMarker라는 태그가 지정되지만 각 노드마다 태그 번호는 다릅니다. 마커 트래킹 시스템은 마커 및 마커에 할당된 0.0에서 1.0 사이의 신뢰도 값을 감지합니다. 올바르면 노드 컨텐츠가 마커 위치로 이동됩니다. 신뢰도 값에 대한 자세한 내용은 최소 마커 신뢰도 가상 현실 기본 설정을 참조하십시오.
마커에 대한 노드 준비
Varjo XR HMD 사용자에게만 제공됩니다.
다음 단계에 따라 MR로 전환하기 전에 노드를 준비합니다. 공간에 맞지 않는 객체는 MR로 전환하기 전에 배율을 낮춰야 합니다.
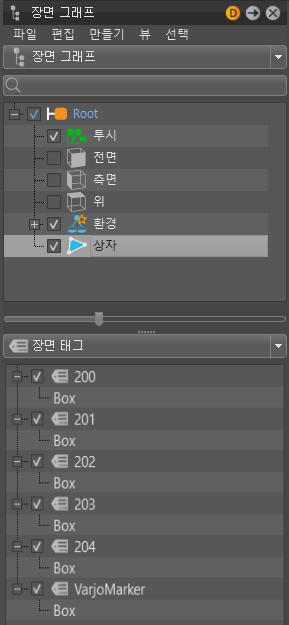
태그를 추가하고 이름을
VarjoMarker로 바꿉니다.객체 노드를 이 태그로 드래그 앤 드롭하여 할당합니다.
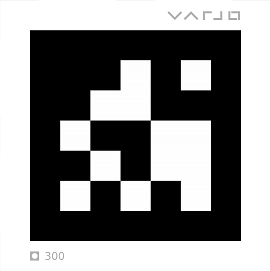
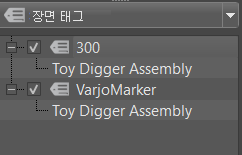
다른 태그를 작성하고 Varjo 마커에 인쇄된 숫자로 이름을 바꿉니다.
동일한 객체 노드를 이 태그로 드래그 앤 드롭합니다.
마커 사용
Varjo XR HMD 사용자에게만 제공됩니다.
계속 진행하기 전에 장면의 노드에 태그를 지정해야 합니다. 이 작업을 수행하지 않은 경우 계속하기 전에 마커에 대한 노드 준비를 참조하십시오.
MR을 지원하는 연결된 Varjo HMD를 착용하고 VRED에서 뷰 > 표시 > Varjo HMD를 선택합니다.
VarjoMarker로 태그가 지정된 객체와 번호 태그가 MR에 나타납니다.컨트롤러를 사용하여 VR 메뉴를 열고 마커 사용을 선택합니다.
형상이 마커로 바로 이동합니다.
팁:객체가 움직일 가능성을 방지하려면 VR 메뉴에서 마커 사용을 비활성화합니다.
MR의 손
현재 Varjo XR HMD는 MR에 대해서만 지원됩니다.
 XR에서 VRED는 VR X-레이 재질 손을 사용자 손으로 대체합니다.
XR에서 VRED는 VR X-레이 재질 손을 사용자 손으로 대체합니다.

MR을 시작하려면 VR 메뉴에서  (MR 기능)을 선택하십시오.
(MR 기능)을 선택하십시오.
MR에서 XR-1 및 XR-3에 대해 각각 지원되는 기능에 차이가 있습니다.
- XR-1은 손 깊이 예측과 마커 트래킹을 지원합니다.
- XR-3은 손 깊이 예측, 마커 트래킹 및 손 트래킹(제스처)을 지원합니다. 즉, 장면 인터랙션에 컨트롤러 대신 손 제스처를 사용할 수 있습니다. VRED는 관절/골격을 지원하는 표준 손을 사용자의 실제 손으로 대체하므로 Python을 사용하여 장면 인터랙션에 손 트래킹기를 연결할 수 있습니다.
Python으로 손 트래킹기 연결
Python을 사용하여 손 트래킹을 연결하는 방법을 확인하려면 파일 > 예제 열기를 선택하고 vr 폴더로 이동합니다. 여기서 externalHandTracking.py를 찾을 수 있습니다. 이 파일에서는 손 트래킹을 설정하는 방법에 대한 예를 제공합니다.
- 왼손에 대해
vrDeviceService.getLeftTrackedHand()를 사용합니다. - 오른손에 대해
vrDeviceService.getRightTrackedHand()를 사용합니다.
반환된 객체는 vrdTrackedHand 유형입니다.
손 깊이 예측
현재 Varjo XR HMD는 MR에 대해서만 지원됩니다.
 혼합 현실 동영상에서 실제 손을 감지하고 가상 객체 앞에 표시합니다(객체보다 가까운 경우). 비활성화된 경우 VRED의 렌더링이 렌더링된 객체보다 손이 더 가까이 있더라도 항상 실제 손을 차단합니다.
혼합 현실 동영상에서 실제 손을 감지하고 가상 객체 앞에 표시합니다(객체보다 가까운 경우). 비활성화된 경우 VRED의 렌더링이 렌더링된 객체보다 손이 더 가까이 있더라도 항상 실제 손을 차단합니다.
VR 메뉴에서 이 옵션을 찾습니다. 이 옵션의 기본 동작을 설정하려면 가상 현실 기본 설정 > HMD 탭 > Varjo 섹션을 방문하십시오.
| 손 깊이 예측 끄기 | 손 깊이 예측 켜기 |
|---|---|
 |
 |
혼합 현실에서 손 표시
현재 Varjo XR HMD는 MR에 대해서만 지원됩니다.
손 깊이 예측 도구를 사용하여 혼합 현실에서 손을 표시합니다.
MR을 지원하는 연결된 Varjo HMD를 착용하고 VRED에서 뷰 > 표시 > Varjo HMD를 선택합니다.
컨트롤러에서 메뉴 버튼을 눌러 VR 메뉴에 액세스합니다.
 아이콘을 눌러 MR에서 실제 손을 표시합니다.
아이콘을 눌러 MR에서 실제 손을 표시합니다.
손 제스처
이 섹션에서는 디지털 설계와 인터랙션하기 위해 지원되는 VRED 손 제스처를 소개합니다. 검지로 모델의 일부를 탭하여 터치 이벤트를 시작하거나, VR 메뉴에서 도구를 선택하거나, HTML 5 HMI 화면과 인터랙션할 때 손의 움직임이 트래킹됩니다. 다음 제스처를 사용하면 컨트롤러 없이도 장면을 탐색할 수 있습니다.
가상 손은 실제 손에 맞게 자동으로 조정됩니다.
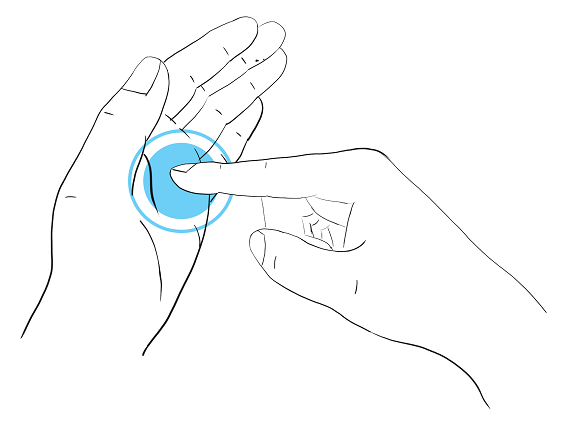
터치 인터랙션
한쪽 손의 검지 끝을 사용하여 화면 컨텐츠(xR 홈 메뉴, 터치 센서 객체 또는 HTML 5 HMI 화면)를 터치하고 인터랙션합니다.
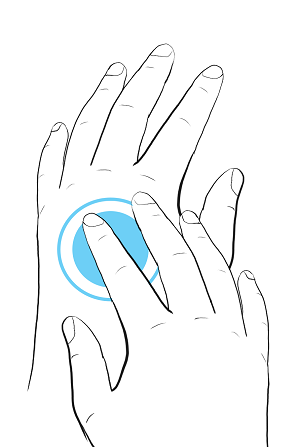
xR VR 메뉴
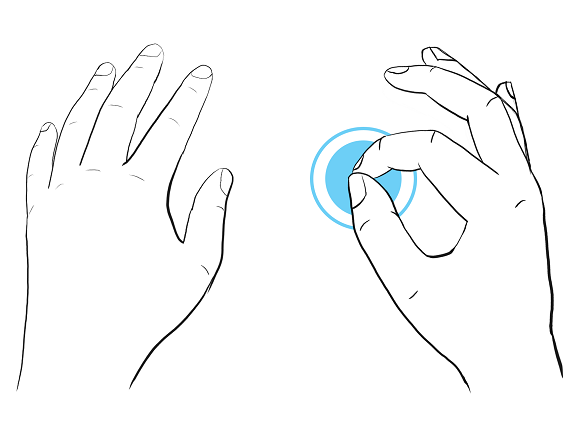
xR 홈 메뉴를 열고 닫을 때는 동일한 제스처를 사용합니다.
검지를 다른 손의 손바닥으로 이동합니다. 그러면 메뉴가 열립니다. 이제 검지로 메뉴에서 옵션을 선택할 수 있습니다. VR 메뉴를 닫으려면 초기 제스처를 반복합니다.
VR 메뉴 및 해당 도구에 대한 자세한 내용은 VR 메뉴를 참조하십시오.
손이 가상 객체 앞에 있지만 가상 객체에 의해 가려지는 경우 손 깊이 예측을 활성화합니다.
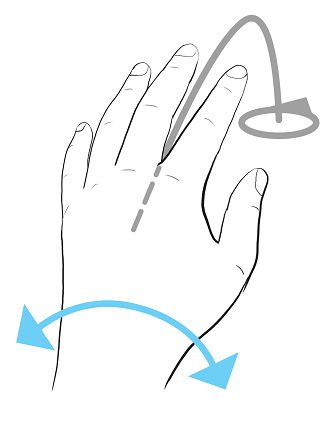
텔레포트
텔레포트하려면 텔레포터를 시작하고, 원과 화살표의 방향을 지정한 후 새 위치로 점프를 실행해야 합니다. 완료되면 텔레포터를 종료합니다.
텔레포트 시작 및 종료
텔레포트를 시작하고 종료할 때는 동일한 제스처를 사용합니다.
한 손으로 다른 손의 손등을 탭합니다. 그러면 탭한 손에서 텔레포트가 시작됩니다. 이제 원의 방향을 지정하고 텔레포트합니다. 이 제스처를 반복하여 텔레포터를 종료합니다.
텔레포트 방향
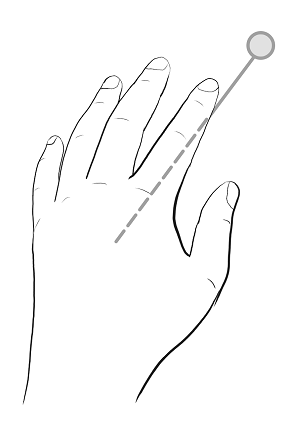
텔레포트 원이 표시되는 동안 손목을 회전하여 텔레포터 방향을 지정합니다. 이제 텔레포트합니다.
텔레포트
손이 현재 텔레포트 원을 표시하지 않은 상태에서 검지와 엄지로 집습니다. 그러면 텔레포트 원 위치 및 방향이 적용되어 텔레포트가 실행됩니다. 완료되면 텔레포트를 종료하여 도구를 종료합니다.
텔레포트에 대한 자세한 내용은 텔레포트를 참조하십시오.
레이저 포인터
레이저 포인터를 사용하려면 레이저 포인터를 시작하고 실행한 후 종료하는 과정이 필요합니다.
레이저 포인터 시작 및 종료
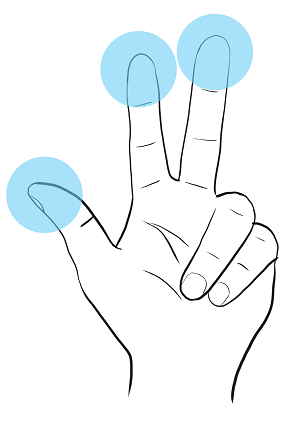
레이저 포인터를 시작 및 종료할 때는 동일한 제스처를 사용합니다.
손바닥이 카메라를 향하게 하고 엄지, 검지 및 중지를 밖으로 향합니다. 이제 레이저 포인터를 사용하여 대상을 가리키거나 장면 내용과의 인터랙션을 트리거할 수 있습니다. 레이저 포인터를 종료하려면 이 제스처를 반복합니다.
레이저 포인터 사용
검지로 장면 내용을 가리킵니다.
검지와 엄지를 모으는 동작으로 VR 메뉴의 도구 선택, 터치 센서 활성화 또는 HTML 5 HMI 화면과의 인터랙션 등 장면 내용과의 인터랙션을 트리거할 수 있습니다. 작업을 마치면 레이저 포인터를 종료하여 도구를 종료합니다.

배치 도구
MR 모드에서만 사용할 수 있습니다.
배치 도구는 객체 회전을 위해 손목을 회전하는 텔레포트와 유사한 방법을 사용합니다. 컨트롤러의 그립 버튼을 눌러 회전을 10° 각도로 스냅할 수 있습니다. 한 객체를 다른 객체에 맞춰 정렬하려는 경우 이 옵션을 사용합니다. 또한 객체를 다른 객체 위에 배치할 수도 있습니다.
배치를 위한 노드 준비
MR 모드에서만 사용할 수 있습니다.
MR에서 객체를 선택하여 배치하려면 먼저 노드를 준비해야 합니다. 객체가 공간에 비해 너무 크거나 작은 경우 MR로 전환하기 전에 객체의 배율을 적절한 크기로 조정해야 합니다.
- 태그를 작성하고 이름을
Place로 바꿉니다. - 장면 그래프에서 객체 노드를 이 태그로 드래그 앤 드롭합니다.
배치 사용
X 모드에서만 사용할 수 있습니다.
계속 진행하기 전에 장면의 노드에 태그를 지정해야 합니다. 이 작업을 수행하지 않은 경우 배치를 위한 노드 준비의 지침을 따르십시오.
MR을 지원하는 연결된 Varjo HMD를 착용하고 VRED에서 뷰 > 표시 > Varjo HMD를 선택합니다.
Place로 태그가 지정된 객체가 MR에 나타납니다.컨트롤러에서 메뉴 버튼을 눌러 VR 메뉴를 연 다음
 (배치)를 선택합니다.
(배치)를 선택합니다.
주황색으로 표시되면 도구를 사용할 수 있습니다. 회색으로 표시된 경우에는 도구를 사용할 수 없습니다. 컨트롤러 위에 활성 항목 및 선택된 항목을 표시하는 표시기가 나타납니다.
객체를 가리키고 트리거를 계속 당겨 가상 지면에서 객체를 선택하고 이동합니다.
손목을 회전하여 위쪽 축을 중심으로 객체를 회전시킵니다. 이 동작은 텔레포트 도구의 동작과 유사합니다.
팁:그립 버튼을 눌러 10도 단위로 증분 스냅합니다. 이 옵션을 사용하면 객체를 다른 객체에 맞춰 정렬할 수 있습니다.
손 트래킹 기본 설정
Varjo XR-3 사용자에게만 제공됩니다.
손 트래킹을 활성화하고 트래킹된 손에 대해 변환 및 회전 손 오프셋을 설정할 수 있도록 인터랙션 기본 설정이 가상 현실 기본 설정에 추가되었습니다.
기본 설정에서 손 트래킹을 활성화하면 VR 또는 MR에 대해 자동으로 활성화됩니다.
VR에서 트래킹되는 손 사용
Varjo XR-3 사용자에게만 제공됩니다.
활성화하면 VR에서 손을 항상 트래킹하도록 기본값을 설정합니다. 트래킹기가 Varjo 통합 Ultraleap으로 설정된 경우 지원되는 HMD에 대해 XR에서도 손 트래킹이 활성화됩니다.
트래킹기
Varjo XR-3 사용자에게만 제공됩니다.
손 트래킹에 사용되는 기본 시스템을 설정합니다.
- Varjo 사용자는 Varjo Integrated Ultraleap을 활성화해야 합니다.
- 기타 손 트래킹 장치를 사용하려면 사용자 지정을 선택합니다.
다른 장치에 대한 손 트래킹 설정
사용자 지정 트래킹기 옵션의 경우 모든 트래킹 데이터를 VRED의 Python 인터페이스에 제공해야 합니다. 이 작업을 수행하는 방법은 장치마다 다를 수 있습니다. 그러나 Python 스크립트를 통해 트래킹 데이터에 액세스할 수 있는 경우 사용된 메서드에서 반환된
vrdTrackedHand객체로 데이터를 설정해야 합니다. 이렇게 하려면 트래킹된 손 및/또는 다른 손가락 관절의 변환 데이터가 필요합니다(작동 방식은externalHandTracking.py예제 파일 참조).테스트의 경우 해당 기본 설정을 지정하고 스크립트를 로드한 다음 VR을 입력합니다. 모든 기능이 작동하는 방식을 이해하기 위해 손 및/또는 관절 변환에 대한 값을 변경하여 스크립트를 수정해야 할 수도 있습니다.
이동 오프셋
손에서 기본 변환 트래킹 오프셋을 설정합니다. 이 옵션을 사용하여 VR에서 트래킹되는 손과 렌더링되는 손 사이의 오프셋을 조정할 수 있습니다.
회전 오프셋
손에서 기본 회전 트래킹 오프셋을 설정합니다. 이 옵션을 사용하여 VR에서 트래킹되는 손과 렌더링되는 손 사이의 오프셋을 조정할 수 있습니다.
마커 트래킹
마커 트래킹 시스템은 각 마커 및 마커에 할당된 0.0에서 1.0 사이의 신뢰도 값을 감지합니다.
0.0은 시스템이 감지된 결과(마커 ID 및 위치)를 100% 잘못된 것으로 간주한다는 의미입니다.
1.0은 시스템이 감지된 결과(마커 ID 및 위치)를 100% 정확한 것으로 간주한다는 의미입니다.
예를 들어 값이 0.9인 마커는 마커의 위치와 ID의 정확성에 대한 신뢰도가 90%임을 의미합니다.
신뢰도 값이 낮은 마커는 이동하는 것처럼 나타납니다. 최소 허용 신뢰도를 높은 값으로 설정하면 신뢰할 수 없는 감지 결과를 시스템에서 무시합니다.
높은 신뢰도 값으로 감지되었지만 나중에 신뢰도 값이 최솟값보다 낮은 것으로 감지된 마커는 무시되고 해당 위치가 업데이트되지 않습니다.
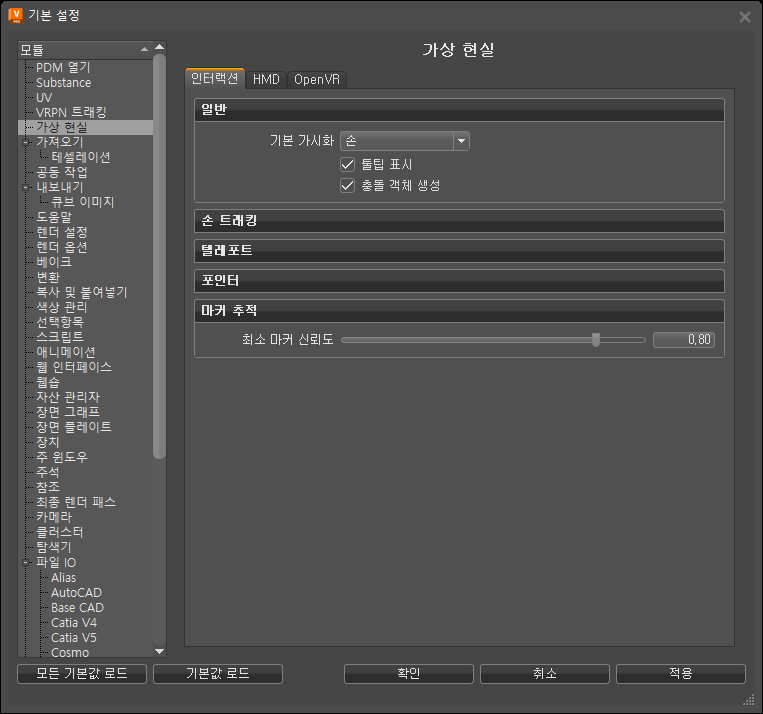
최소 마커 신뢰도
마커 트래킹 시스템에서 감지된 마커 위치가 올바른지 결정하는 데 사용하는 기본 최소값을 설정합니다.
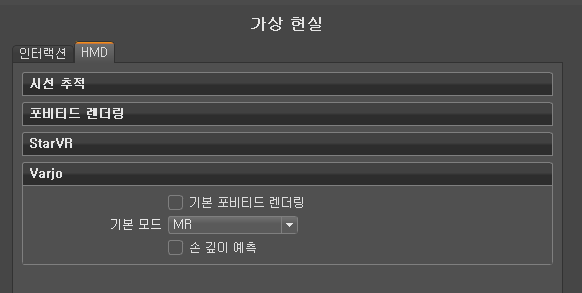
Varjo 기본 설정
기본 포비티드 렌더링의 기본 상태, 전환하는 모드 및 손 깊이를 설정할 수 있도록 HMD 탭에 Varjo HMD 관련 기본 설정이 추가되었습니다.
기본 포비티드 렌더링
시선 추적을 활성화해야 합니다.
HMD 탭 > Varjo 섹션에서 주변 항목이 렌더링되는 방법에 대한 기본 상태를 설정하는 데 사용합니다. 활성화된 경우 주변 해상도(이미지 품질)는 감소하지만, 사용자의 눈이 추적하는 영역은 계속 고해상도로 렌더링됩니다. 이렇게 하면 컴퓨팅 집약적 재질을 사용하고 실시간 안티앨리어싱을 사용할 때 장면의 성능이 향상됩니다. 포비티드 렌더링 및 다양한 설정에 대한 자세한 내용은 사용자 지정 품질을 참조하십시오.
기본 모드
HMD 탭 > Varjo 섹션에서 Varjo HMD의 기본 보기 모드를 설정하는 데 사용합니다. 항상 혼합 현실에서 작업하는 경우 이 값을 MR로 설정합니다.
손 깊이 예측 기본 설정
HMD 탭 > Varjo 섹션에서 MR의 실제 손에 대한 기본 상태를 설정하는 데 사용합니다. 활성화된 경우 혼합 현실 동영상에서 실제 손을 감지해 가상 객체 앞에 표시합니다(객체보다 가까운 경우). 비활성화된 경우 VRED의 렌더링이 렌더링된 객체보다 손이 더 가까이 있더라도 항상 실제 손을 차단합니다.
| 손 깊이 예측 끄기 | 손 깊이 예측 켜기 |
|---|---|
|
|
마커용 Python
다음은 마커 트래킹의 사용자 지정 버전을 구현하기 위한 Python 인터페이스에 대한 함수입니다. 이러한 함수는 vrImmersiveInteractionService 문서에서 찾을 수 있습니다.
createMultiMarker
vrImmersiveInteractionService.createMultiMarker(multiMarkerName, markerNames, markerType) 여러 일반 마커의 포즈를 평균하여 다중 마커를 만듭니다.
매개변수
- multiMarkerName(string) - 다중 마커의 이름. 자유롭게 선택할 수 있음
- markerNames(List[string]) - 다중 마커를 구성하는 마커의 이름
- markerType(vrXRealityTypes.MarkerTypes) - 다중 마커를 구성하는 마커의 유형
반환 값
반환 유형
vrdMultiMarker
getDetectedMarkers
vrImmersiveInteractionService.getDetectedMarkers(markerType) 지정된 유형의 감지된 모든 마커를 가져옵니다.
매개변수
- markerType(vrXRealityTypes.MarkerTypes) - 마커의 유형
반환 값
감지된 마커
반환 유형
List[vrdMarker]
getMarker
vrImmersiveInteractionService.getMarker(name, markerType) 이미 감지된 마커를 가져옵니다.
매개변수
- name(string) – 마커의 이름
- markerType(vrXRealityTypes.MarkerTypes) - 마커의 유형
반환 값
마커 또는 이름 및 유형 조합이 감지되지 않는 경우 null 마커
반환 유형
vrdMarker
getMinMarkerConfidence
vrImmersiveInteractionService.getMinMarkerConfidence() setMinMarkerConfidence도 참고하십시오.
반환 값
최소 마커 신뢰도
반환 유형
float
setMinMarkerConfidence
vrImmersiveInteractionService.setMinMarkerConfidence(confidence) 최소 마커 신뢰도를 설정합니다. 더 낮은 신뢰도의 마커가 감지되면 무시됩니다. 업데이트된 데이터에 대한 신뢰도가 낮은 경우 시스템에 이미 알려진 마커는 업데이트되지 않습니다.
매개변수
- confidence(float) – 최소 신뢰도
markersDetected
vrImmersiveInteractionService.markersDetected(markers) 이 신호는 최소 마커 신뢰도보다 높거나 같은 신뢰도를 가진 새 마커가 감지되면 트리거됩니다.
매개변수
- markers(List[vrdMarker]) - 감지된 마커입니다.
markersUpdated
vrImmersiveInteractionService.markersUpdated(markers) 이 신호는 최소 마커 신뢰도보다 높거나 같은 신뢰도를 가진 새 마커가 감지되면 트리거됩니다.
매개변수
- markers(List[vrdMarker]) - 감지된 마커입니다.