运动类型表参照
| 访问: | 在“插入运动类型”对话框中,单击“显示运动类型表”按钮。 |
单击对话框上部区域中的图像,从一种类别的运动类型移动到另一种类别的运动类型。
标准运动类型
标准运动类型是最常用的运动类型。这些运动类型基于不同的转动和平动自由度组合。此类别中具有以下可用运动类型:
![]() 旋转
旋转
![]() 平移
平移
![]() 圆柱
圆柱
![]() 球面运动
球面运动
![]() 平面运动
平面运动
![]() 球面圆槽运动
球面圆槽运动
![]() 线-面运动
线-面运动
![]() 点-面运动
点-面运动
![]() 空间自由运动
空间自由运动
![]() 焊接连接
焊接连接
注意:如果启用了“自动转换对标准联接的约束”,则您可以手动添加空间自由运动,但是您不能一次将多个装配约束转换为一个运动类型。
传动类型
尽管图像表明可以使用运动关系来模拟齿轮机构,但这并不能说明轮齿的实际啮合。该方法基于为齿轮的有效传动半径选择的几何图元确定传动比。
注意:如果有效传动半径处不存在几何图元,则您必须向零件添加草图。
![]() 齿轮齿条运动
齿轮齿条运动
![]() 外齿轮啮合运动
外齿轮啮合运动
![]() 内齿轮啮合运动
内齿轮啮合运动
![]() 凸轮-滚子运动
凸轮-滚子运动
![]() 带传动
带传动
![]() 平面锥齿轮啮合运动
平面锥齿轮啮合运动
![]() 普通锥齿轮外啮合运动
普通锥齿轮外啮合运动
![]() 普通锥齿轮内啮合运动
普通锥齿轮内啮合运动
![]() 螺旋运动
螺旋运动
![]() 蜗轮
蜗轮
滑动类型
![]() 平面圆柱运动
平面圆柱运动
![]() 圆柱-圆柱外滚动
圆柱-圆柱外滚动
![]() 圆柱-圆柱内滚动
圆柱-圆柱内滚动
![]() 凸轮-滚子运动
凸轮-滚子运动
![]() 圆槽滚子运动
圆槽滚子运动
接触类型
2D Contact 类型非常精确。它可以检测何时会发生碰撞,同时又允许发生分离。由于表面没有面数并且未被穿透,因此结果中很少出现异常。使用凸轮和从动轮等机构时,使用这些运动类型(而不是 3D Contact 运动类型)可以精确地研究机构的行为。在某些情况下,必须在零件上创建额外的几何图元或者使用多个 2D Contact 运动类型来获得所需的结果。
![]() 2D Contact
2D Contact
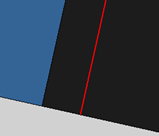
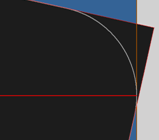
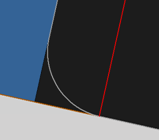
修改几何图元以确保回路连续、“平滑”。
为了为 2D Contact 算法提供平滑的连续回路(用于改进计算),将执行轻微的几何图元修改。截面轮廓中的所有不连续将变平滑,以形成连续回路,使软件可以快速识别接触。以下示例说明了软件内发生的情况。


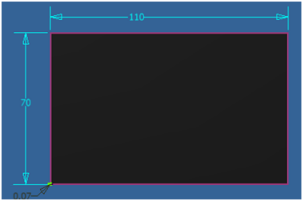
重要信息:此公式不能修改。如果您要完全控制圆角半径,则必须在模型中创建适当的圆角。
受力类型
![]() 3D Contact
3D Contact
![]() ** 弹簧/阻尼器/千斤顶**
** 弹簧/阻尼器/千斤顶**
| 类型 | 参数 | 显示 | 注释 |
|---|---|---|---|
| 螺旋弹簧 | 刚度、自由长度、阻尼 | 螺旋弹簧 | 默认类型。该力取决于 2 点之间的距离(刚度和自由长度)以及它们之间的速度(阻尼)。 |
| 弹簧 | 刚度、自由长度、阻尼 | 分隔的、堆叠的圆柱体 | 与螺旋弹簧相同的操作。显示有点类似于碟形垫圈,且优化了显示时间。 |
| 弹簧阻尼器 | 刚度、自由长度、阻尼 | 螺旋弹簧和阻尼器 | 与螺旋弹簧相同的操作。该显示类似于汽车减震器。 |
| 阻尼器 | “阻尼” | 阻尼器 | 仅阻尼操作。力取决于 2 点之间的速度。 |
| 千斤顶 | 输入图示器或常量 | 阻尼器 | 直接对模型应用力参数。该图形说明千斤顶类型的机构。 |