Impostazioni IFA - scheda Risolutore
Le impostazioni del risolutore IFA possono essere applicate a tutte le simulazioni. Ogni volta che si avvia una nuova simulazione, vengono utilizzate queste preferenze. È possibile sostituire le impostazioni globali modificando le proprietà di ogni singola simulazione.
Questa sezione illustra i controlli disponibili nella scheda Risolutore.
Accesso: | Barra multifunzione: scheda IFA  gruppo Impostazioni Impostazioni IFA gruppo Impostazioni Impostazioni IFA  |
Algoritmo DSC
L'algoritmo DSC consente di calcolare una struttura con cedimenti.
Per qualsiasi trave per cui sia stato definito un qualsiasi tipo di analisi, con i seguenti cedimenti:
- Normale
- Unilaterale
- Elastico
- Elastico e unilaterale
Vengono eseguite le seguenti operazioni:
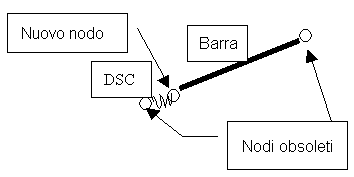
Viene generato un nuovo nodo nella struttura al momento della generazione del modello strutturale.
L'elemento di input con il cedimento viene modificato. Il nuovo nodo sostituisce quello precedente nell'elemento (il nodo precedente rimane negli altri elementi strutturali).
Tra il nodo precedente e quello nuovo, IFA crea l'elemento DSC (discontinuità). Vedere l'immagine di seguito:
L'elemento DSC è un elemento a due nodi, in cui le forze nodali vengono generate in base alla seguente formula:
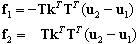
dove k = [ki]; i=1, Ndl è il vettore di rigidezza assegnato ai particolari gradi di libertà.
Di seguito è riportata la matrice di rigidezza dell'elemento:
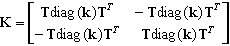
dove T è la matrice di trasformazione dalla base locale a quella globale, ereditata dall'elemento barra e diag(k) è la matrice diagonale creata dal vettore k.
L'utilizzo degli elementi DSC consente di definire i cedimenti elastici in una trave.
Metodo di risoluzione
Selezionare uno dei seguenti metodi per risolvere il sistema di equazioni lineari.
Automatico: si basa su un insieme di regole per selezionare il metodo appropriato.
- Skyline viene utilizzato se il numero di equazioni è inferiore a 500.
- Multi-thread viene utilizzato se il numero di equazioni è superiore a 5.000.
- Sparse M viene utilizzato negli altri casi.
Frontale: utilizza il metodo di eliminazione Gauss.
- Utilizzo della memoria: basso
- Utilizzo del disco: elevato
- Velocità stimata: bassa
- Applicazione: fino a 50000 equazioni; statiche lineari e non lineare, analisi armonica
- Note aggiuntive In molti casi permette di ottenere numeri di nodi e gradi di libertà per le equazioni in relazione alle quali si verificano problemi di calcolo, tra cui strutture con vincoli non corretti.
Skyline: utilizza il metodo di fattorizzazione Cholesky LDLt.
- Utilizzo della memoria: basso
- Utilizzo del disco: elevato
- Velocità stimata: bassa
- Applicazione: fino a 50.000 equazioni; tutti i tipi di analisi
- Note aggiuntive In molti casi permette di ottenere numeri di nodi e gradi di libertà per le equazioni in relazione alle quali si verificano problemi di calcolo, tra cui strutture con vincoli non corretti.
Sparse: utilizza il metodo di sezioni inserite (NDM).
- Utilizzo della memoria: elevato
- Utilizzo del disco: medio
- Velocità stimata: media/veloce, a seconda dell'efficacia di riordinamento
- Applicazione: da 10.000 a 200.000 equazioni, non per l'analisi modale che riconosce le forze statiche
- Note aggiuntive I risolutori sparse diretti (SPDS) sono raccomandati per i modelli di elementi finiti 3D di grandi dimensioni, quali edifici a più piani, strutture con lavorazione di svuotamento e strutture solide. Rilevano le strutture condizionate in modo errato ma non permettono di ottenere i numeri di nodi e i gradi di libertà per le equazioni in relazione alle quali si verifica un problema di calcolo Sono particolarmente raccomandati per le strutture condizionate in modo errato in assenza di convergenza dei metodi iterativi.
Sparse M: utilizza l'algoritmo della potenza minima (MDA).
- Utilizzo della memoria: elevato
- Utilizzo del disco: medio
- Velocità stimata: media/veloce, a seconda dell'efficacia di riordinamento
- Applicazione: da 10.000 a 200.000 equazioni, non per l'analisi modale che riconosce le forze statiche
- Note aggiuntive I risolutori sparse diretti (SPDS) sono raccomandati per i modelli di elementi finiti 3D di grandi dimensioni, quali edifici a più piani, strutture con lavorazione di svuotamento e strutture solide. Rilevano le strutture condizionate in modo errato ma non permettono di ottenere i numeri di nodi e i gradi di libertà per le equazioni in relazione alle quali si verifica un problema di calcolo Sono particolarmente raccomandati per le strutture condizionate in modo errato in assenza di convergenza dei metodi iterativi.
Multi-thread: utilizza il risolutore PARDISO della libreria di kernel Intel® Math.
Possibilità di calcolare progetti strutturali di grandi dimensioni grazie alla rinumerazione ottimale del sistema di equazioni e all'utilizzo della memoria.