チュートリアル: ダイナミック シミュレーションでの拘束の変換
既定では、アセンブリに存在する拘束は、ダイナミック シミュレーション時に、自動的にジョイントに変換されます。これにより、パーツにジョイントを作成するという手間のかかる作業がなくなります。
注: ダイナミック シミュレーションでは、自由度に関係する拘束(メイト、インサートなど)を変換できます。ただし、位置に関係する拘束(角度など)は変換できません。
チュートリアル ファイルを開く
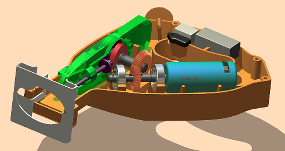
アクティブなプロジェクトを tutorial_files に設定して、Reciprocating Saw.iam を開きます。
[名前を付けて保存]コマンドを使用し、新しいファイルに RecipSaw-saved.iam などの名前を付けます。
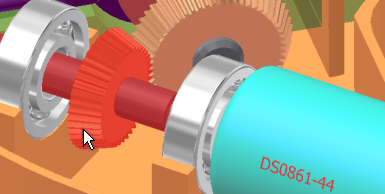
アセンブリがどのように動くかを確認するには、かさ歯車をモータの先端にドラッグします。ギアは回転しますが、リンク機構の他のコンポーネントは動きません。
練習中は定期的にアセンブリを保存してください。