Добавление соединений при моделировании движущихся сборок
Выталкиватель предназначен для скольжения через часть компонента "Направляющая". Однако для удержания ролика выталкивателя вплотную к кулачку между компонентами "Выталкиватель" и "Направляющая" необходимо создать пружину. В среде динамического моделирования для этого имеется соответствующее соединение "Пружина / Амортизатор / Домкрат".
Выберите на ленте вкладку «Динамическое моделирование»
 панель «Соединение» «Вставить соединение» и в списке выберите соединение «Пружина/амортизатор/домкрат».
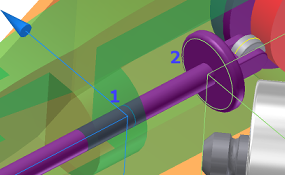
панель «Соединение» «Вставить соединение» и в списке выберите соединение «Пружина/амортизатор/домкрат».На компоненте направляющей выберите профиль отверстия, через которое выталкиватель проходит через направляющую (1).
В месте контакта пружины с выталкивателем выберите профиль ребра.
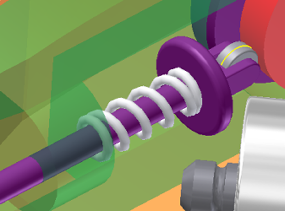
В результате в браузере будет создано пружинное соединение и графическое представление пружины. Это представление способно деформироваться и имеет силы действия-реакции, но не имеет массы.
В папке браузера "Силовые соединения" щелкните правой кнопкой мыши пружинное соединение и выберите "Свойства".
В основном разделе диалогового окна укажите:
Жесткость = 2,500 Н/мм
Длина в свободном состоянии = 42 мм
Раскройте диалоговое окно и укажите:
Радиус = 5,2 мм.
Число витков = 10
Радиус проволоки = ,800 мм
Нажмите кнопку "OK". Свойства пружины и графическое изображение будут обновлены.
В папке "Внешние нагрузки" обозревателя щелкните правой кнопкой мыши "Сила тяжести" и выберите "Определить силу тяжести". Также можно дважды щелкнуть узел "Сила тяжести". При необходимости снимите флажок "Подавить".
Выберите ребро кожуха, как показано на рисунке, чтобы указать вектор силы тяжести.
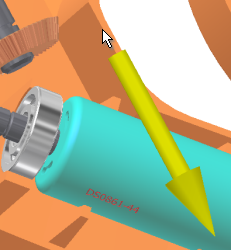
Нажмите «ОК».