- 270 度转弯路径半径
- 车辆执行 270 度转弯(即在左侧行驶的车辆左转或在右侧行驶的车辆右转)的最快车辆路径的最小半径。
- 270 度转弯路径速度
- 对应于 270 度转弯路径半径的速度。
- 90 度转弯路径半径
- 车辆执行 90 度转弯(即在左侧行驶的车辆左转或在右侧行驶的车辆右转)的最快车辆路径的最小半径。
- 90 度转弯路径速度
-
对应于 90 度转弯路径半径的速度。
- 活动栓钩
- 一种由拖车杆组成的后轮轴,杆朝后,与前轮轴或铰接点链接(因此被称为“活动栓钩”)。
- 实际轴距
- 牵引车最内侧的轮轴之间的距离,或者,从主销或拖车杆轴心点到拖车杆或半挂车上的最内侧的后轮轴的距离。
- 50m 内的进场坡度
- 环形交叉口的最后 50m 引道的平均坡度。
- 进场半宽
- 进场道路的宽度,在从任何入口喇叭形路段、中间线到左侧路缘线的进场上游的一个点测量。
- 进场停车视距
- 要求的环形交叉口进场视距线。进场驾驶员必须能够从在必要时可以停止的后方足够远的一个点看到的让行线或交叉口上的一个点。
- 停机坪
- 停机坪又称缓冲区,是在中心岛之外提供的一个供大型车辆通行的区域。停机坪的外侧限制是普通车辆转向 270 度的右侧限制。
注: 在世界某些国家/地区(尤其是美国),停机坪被认为是交通岛的一部分,而在其他国家/地区(尤其是英国),停机坪被认为是交通岛和主循环区域之间的一个区域。在环形交叉口点中,停机坪被认视在中心岛外部,即停机坪直径可能始终大于交通岛半径。
- 停机坪直径
- 停机坪或缓冲区的直径。停机坪直径始终大于中心岛直径。
- 停机坪宽度
- 停机坪宽度是停机坪半径和中心岛半径之间的差。它始终不能小于 0。
- 上分支
- 连接至环形交叉口的道路。在世界某些国家/地区被称为下分支。
- AutoDrive
- 驾驶车辆的一种方式,在移动目标点(光标)时自动计算给定位置的路径。
- 轮轴间距
- 位于一个组件前面或后面的多轮轴组中的相邻轮轴之间的距离。
- 入口后向可见性
- 在左侧行驶时或在右侧行驶时在环形交叉口入口行驶到左侧时环形交叉口入口右侧的可见性。
- 基线
- 基线是穿过一行停车位后面的线。
- 车位标记
- 车位标记包括用于标记首选的轿车位置的油漆线、符号和影线。
- 车位样式
- 标记、安全区域、符号和停车附件的各种组合被称为车位样式。
- 车位符号
- 车位符号是车位中用于指示车位使用情况等的彩色图案。
- 弯道交通岛
- 弯道交通岛位于一行停车位方向变化的位置。
- 过渡点
- 环形交叉口上分支路线上连接现有道路或与之匹配的点。
- 脚轮转向
- 属于固定轮轴组但可以自由旋转的车轮。有时称为自转轮。
- 猫须
- 请参见“预测转弯”。
- 中心岛(或简称交通岛)
- 位于环形交叉口中心的无法通行的交通岛,是车辆转弯 270 度的正常右侧限制。
注: 世界某些国家/地区(尤其是美国)认为中心交通岛应包括大型卡车的缓冲区。环形交叉口将此缓冲区视为位于中心岛之外。
- 中心线偏移
- ICD 的上分支路线切线和交通岛的中心之间的垂直距离。如果切线穿过入口道路另一侧的交通岛的中心,则偏移为正。因此,通常中心线偏移越大,入口偏移就越大,反之亦然。
- 循环路径半径
- 环绕中心交通岛的最快车辆路径的最小半径。
- 循环路径速度
- 对应于循环路径半径的速度。
- 环形车道中间带
- 车辆在内切圆和中心岛之间的中间行驶的路径。
- 环路宽度
- 内切圆半径减去交通岛半径。
注: 首选的实际车辆路径限制通常在宽度范围内。
- 冲突角
- 请参见“入口角度”。
- 转向角
- 似乎只是美国消防部门用于表示最大车轮转角的一个术语。请参见“车轮切入”。
- Cross Slope
- 从中心向外测量的道路的坡度。
- 路缘线
- 表示实际路缘的道路侧边缘的线。
- 路缘偏移
- 路缘线在限定线外部偏移的距离。
- 路缘侧编号
- 当在停车位附近放置停车位编号时,即为路缘侧编号。
- 路缘转弯半径
- 车轮可以在其中旋转的最小圆的半径。假定这种情况在应用完全转向锁定时发生。
- 切入点
- 元素的脊椎和它所转录的圆弧相切的点。
- 切入半径
- 切入点穿过的弧线的半径。
- 限定线
- 表示道路限制的虚拟线。实际路缘线可能会也可能不会与该线重合。
- 至下一个上分支的距离
- “至下一个上分支的距离”是从当前上分支的让行线的右侧到下一个上分支上的中间带标记或交通岛(以最近者为准)的最近的点的直线距离。
- 拖动线
-
从车辆上的最前端和最后端的夹点绘制的线,该线可用于延伸路径。这些线的长度随车辆尺寸而变化,可以将其关闭。
- 拖车杆
- 牢牢附着在一个轮轴或一组轮轴上的刚性牵引杆。拖车杆和轮轴作为一个图元围绕将它们链接到单元主体的主销旋转。
- 拖车杆铰接角度
- 在拖车杆的轴心点处拖车杆和关联的拖车脊椎所对的角度。
- 拖车杆长度
- 拖车杆长度从相关轮轴组的中心到拖车杆的实际末端进行测量。必须在 Vehicle Tracking 中单独定义远端的联轴器。
- DXF 文件
- DXF 是图形交换格式的缩写,这是一种用于在不同的 CAD 系统之间传输数据的文本文件格式。
- 动态编辑
- 通过将目标点(和/或中间点)处的夹点拖曳到新位置来编辑路径。路径将在放下夹点时自动更新。
- 有效固定轮轴
- 有效固定轮轴是与固定轮轴组对车辆扫掠路径具有相同影响的单个轮轴。它是考虑到伸缩轴和自转向轴的影响后组的质心。
- 有效喇叭形路段长度
-
有效喇叭形路段长度是下方图解中的距离 l’。
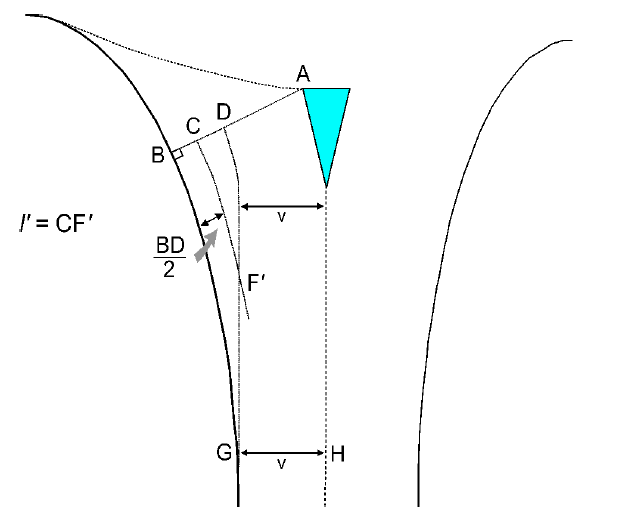 注: ARCADY 用于分析微型环形交叉口的有效喇叭形路段长度是平均有效喇叭形路段长度,其构建方式和标准环形交叉口相同,但是使用最小进场道路半宽而不是进场道路半宽构建。
注: ARCADY 用于分析微型环形交叉口的有效喇叭形路段长度是平均有效喇叭形路段长度,其构建方式和标准环形交叉口相同,但是使用最小进场道路半宽而不是进场道路半宽构建。 - 有效前轮轴
- 影响与定义的实际前轮轴组相同的单个轴。
- 有效前轮轴偏移
- 有效前轮轴和参考基准的偏移。如果有效轮轴位置是在参考基准后面,则偏移为正。
- 有效前轮距
- 用于路径计算的前车轮外面之间的距离。
- 有效后轮轴
- 影响与定义的实际后轮轴组相同的单个轴。
- 有效后轮轴偏移
- 有效后轮轴和参考基准的偏移。如果有效轮轴位置是在参考基准后面,则偏移为正。
- 有效后轮距
- 用于路径计算的后车轮外面之间的距离。
- 有效转向轴
- 有效转向轴偏移是与给定转向轴组对车辆扫掠路径具有相同影响的单个轴。它是转向轴组的最外侧的轮轴,即前轮轴组中最前端的轮轴和后轮轴组中最后端的轮轴。
- 有效轴距
- 有效前轮轴和有效后轮轴之间的距离。
- 终点交通岛
- 终点交通岛是在几行停车位末端设置的非停车区。
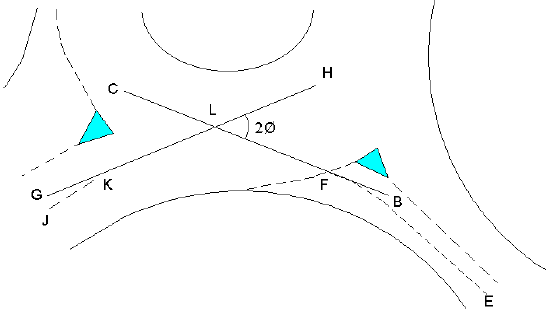
- 入口角度
- 入口角度或冲突角 F (Phi) 是输入流和循环流之间的角度的几何替代值。它采用两种计算方法中的一种,具体取决于中间带环回路径的入口和出口切线是否相交。
当入口和出口切线在环形车道中间带“内部”相交,入口角度是入口切线和交叉点处环形车道中间带的切线之间的角度。
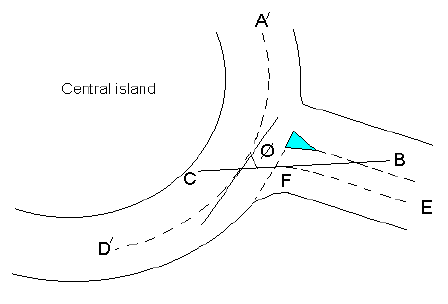
当入口和出口切线在环形车道中间带“外部”相交,入口角度是入口和出口切线之间角度的一半。
- 入口角路缘线距离
- “入口角路缘线距离”是入口角路缘线的长度,从入口路缘上的一个点到路缘远端的一个点进行测量,一条垂线从前一个点上升到让行线的右侧,另一条垂线从后一个点上升到顺时针方向的下一个上分支的出口宽度测量的右侧。
- 入口偏转
- 车辆必须从直线路径偏转的程度,以便顺利通过环形交叉口入口。
- 入口路径半径
- 位于或接近入口让行线的最快车辆路径的最小半径。另请参见“最大入口路径半径”。
- 入口切线
- 进入入口路径和让行线交叉口的车辆的路径切线。
- 出口路径半径
- 位于或接近出口的最快车辆路径的最小半径。
- 入口路径速度
- 对应于入口路径半径的车辆速度。
- 出口路径速度
- 对应于出口路径半径的速度。
- 出口切线
- 驶离出口路径和 ICD 交叉口的车辆的路径切线。
- 包络线
- 一条表示最大车身或车轮移动量的线。对于车辆车身,它是任何车身上任意点移动的外部限制。对于车轮,它是任何车轮行程的外部限制。
- ETW
- 行车道边缘
- 出口倾翻
- 出口倾翻是指车辆在继续通过一个点时通常开始转向(即,使转向开始时间延迟),然后回转和驶离弯道。和正常路径的侧向偏转是出口倾翻距离。
- 最快路线
- 最快路线是车辆以最快的速度驶过环形交叉口时所选路径的中心线。多个标准在不同的方面对此进行定义,但通常入口、出口和交通岛的顶点的偏移最小。另外,通常指定开始和结束位置。
- 第五个车轮
- 牵引车上的一个马蹄铁形的连接装置,用于连接到半挂车上的一个被称为主销的销。
- 喇叭形路段车道
- 在环形交叉口入口增加的一条额外的车道,用于管理车辆移动。
- 跟随
- 一种驾驶车辆的方式,您可以在其中指定所需路径作为多段线,使车辆尝试跟随路径行驶。
- 前向环路可见性
- 循环区域周围的可见性。
- 正向最快路径可见性
- 从进入最快路径的车辆到下一个上分支的最快入口路径上的冲突点的可见性。
- 入口正向可见性
- 在左侧行驶时或在右侧行驶时在环形交叉口入口行驶到右侧时环形交叉口入口左侧的可见性。
- 夹点
- 选定对象时显示的小方块。可以使用鼠标选择并移动夹点。
- 急转弯标记
- 由在入口连接的两条边线组成的一类停车位标记。
- 平视显示器
- 显示用户可以查看的数据,用户不用转移对手头任务的注意力。
- HUD
- 请参见“平视显示器”。
- ICD
- 内切圆直径
- 在车位中编号
- 当在每个标记的停车位放置停车位编号时即为“在车位中编号”。
- 独立转向架
- 沿车辆排列的多个链接的转向架,每个转向架自带转台。也称为串联轮轴。另请参见“浮轴”。
- 内切圆
- 代表环路宽度的外部限制的限定线。
- 中间夹点
- 沿目标点之间的路径显示的瞬态编辑夹点,使路径编辑变得更容易。中间夹点选中后成为目标点。
- 交点视距
- 从前一个上分支进入的车流和/或已环行的车流的可见性。
- 主销
- 在半挂车上,一个连接到牵引车上的马蹄铁形连接装置(称为第五个车轮)的销。
- 车道线
- 朝相同方向行驶的车流的车道之间的线。
- 图层
- 一种将对象组合到一个 AutoCAD 图形中的方式。对图层特性(例如可见性)的控制可以独立于它们包含的对象。另请参见 MicroStation 中对应的标高。
- 标高
- 一种将对象组合到一个 MicroStation 图形中的方式。对图层特性(例如可见性)的控制可以独立于它们包含的对象。另请参见 AutoCAD 中对应的图层。
- 链接比例
- 链接比例是单元一端的铰接或车轮转角应用到另一端的轮轴组的比例。可以从角度或角度的切线方面指定比例。就计算而言,如果链接基于角度,链接比例应为:-
LinkageProportion = LinkedAngle/PrimaryAngle
如果链接基于切线,链接比例应为:-
LinkageProportion = tan(LinkedAngle)/tan(PrimaryAngle)
就我们所知,后者是更常见的链接方式,在这种情况下,对于所有主要的角度,有效的切入点偏移都是固定的。
- Loci(轨迹)
- Locus(轨迹)的复数形式。请参见“Locus(轨迹)”。
- 锁定
- 转向角度;因此,最大左侧锁定为左转时的最大转向角度,最大右侧锁定为右转时的最大转向角度。
- 最大转向所需时间
- 最大转向所需时间是车辆驾驶员在一个连续的运动中,将转向装置从一个方向的最大角度(完全锁定)转向到相反的方向的最大角度(完全锁定)所需的时间。
- Locus(轨迹)
- 空间中一个移动的点的路径。在 Vehicle Tracking 中,轨迹是指轮距或车身顶点的路径。在 Vehicle Tracking 中用它的复数形式 Loci 表示。
- 手动驾驶
- 一种使用屏幕上显示的控制覆盖驾驶车辆的方式。车辆根据光标在控制覆盖上的位置前向左右移动。
- 最大拖车杆铰接角度
- 允许的最大拖车杆铰接角度。
- 最大入口路径半径
- 可以在最快路径起点偏移处绘制的与道路路线相切的最大半径以及在环形区域内绘制与偏移圆相切的最大半径。另请参见“入口路径半径”。
- 最大入口路径速度
- 对应于最大入口路径半径的速度。
- 最大车轮转角
- 组中的任何车轮(即前轮或后轮)的最大角度。这通常是最内侧轮轴上的内部车轮,但如果组中的轮轴的宽度变化,也可能是其它车轮。另请参见“转向角”和“车轮切入”。
- 最小进场半宽
- 在进场的最后 100 米内的任意位置测量的最小进场半宽。
- 最小切入半径
- 车辆在最大转向角度转向时切入点穿过的弧线的半径。
- 模型设置
- 控制指定的车辆在特定情况下的行为的标准。例如,可能对允许的锁定速率设置下限。
- 左侧
- 在为当地设计的标准客车中,距离乘客最近的一侧。
- Object Enabler
- AutoCAD 附加模块,允许第三方图元,如 Vehicle Tracking 路径图元重新生成,但无法对其进行编辑。
- 偏移包络线
- 在增加进一步的界限的情况下,车身或车轮最大移动量的包络线。这可能表示安全或间隙界限。
- 右侧
- 在为当地设计的标准客车中,距离驾驶员最近的一侧。
- 缓冲区
- 请参见“停机坪”。
- 倾翻
- 一种用于减少车辆在弯道超车抢道的技术,车辆借助该技术暂时朝相反的方向转向(侧向倾翻)或延迟驶离弯道(出口倾翻)。
- 倾翻角度
- 在执行倾翻(侧向或出口倾翻)时,倾翻角度是车轮和其在执行非倾翻移动时所选的路径的角度偏差。
- 飞马人行横道
- 请参见“信号控制的人行横道/骑马者横道”。
- 鹈鹕人行横道
- 请参见“信号控制的人行横道”。
- 浮轴
- 横跨和沿与 Ackerman 轮轴几乎相同的方式转向的单元排列的多个链接的转向架,即离转向中心最远的那些轮轴跟随最宽的半径弧线。
- 预测转弯
- 预测转弯是 AutoDrive 的一项功能,用于显示设置的最后一个位置的车辆路径的界限和重影未选中的位置的车身或车轮包络线的界限。也称为“猫须”。
- 主轮轴
- 组中的最内侧的轮轴,即前轮轴组中的最后端的轮轴和后轮轴组中的最前端的轮轴。
- 隐私帖子
- 隐私帖子用于防止未经授权的人员使用停车位。
- 纵断面
- 纵断面是一个允许显示包含尺寸的车辆的侧面图或平面视图的 Vehicle Tracking 对象。
- 纵断面图
- 纵断面图是一个用于在栅格上以图表线的形式显示地面纵断面的 AutoCAD Civil 3D 对象。有关详细信息,请参见 AutoCAD 文档。
- 海鹦人行横道
- 请参见“信号控制的人行横道”。
- R1
- 请参见“入口路径半径”。
- R1 最大
- 请参见“最大入口路径半径”。
- R2
- 请参见“循环路径半径”。
- R3
- 请参见“出口路径半径”。
- R4
- 请参见“270 度转弯路径半径”。
- R5
- 请参见“90 度转弯路径半径”。
- 有轨车车轮
- 旨在轨道上行驶的车轮,轨道通常具有内部法兰,以防止车轮出轨。
- 伸缩轴
- 存在但没有接触路面的轮轴。在 Vehicle Tracking 计算有效轮轴的位置时忽略伸缩轴。
- 安全标柱
- 可能在停车位末端放置安全标柱,防止车辆超出停车位。
- 安全区域
- 安全区域是为满足特定要求而提供的额外空间区域,该区域是从停车位的边线和入口线的中心测量。
- 脚本
- 一种通过发出命令驱动车辆的方式,例如:前进 10 米、左转 30 度,继续行进 5 米。
- 辅助转向
- 其角度可以控制但不是车辆主转向的转向轴组。轮轴可能链接到其它轮轴或单独控制。
- 辅助转向角度
- 辅助转向轴中心处的假想的车轮的角度。请参见“辅助转向”。
- 自转向
- 属于固定轮轴组但可以自由旋转的车轮。有时称为小脚轮。
- 分隔线
- 朝相反的方向行驶的车流的车道之间的线。
- 服务类型
- 停车区的不同的用途称为服务类型。
- 侧向倾翻
- 侧向倾翻是指在车辆开始转向时,反向锁定较短的距离后再进行转向。和正常路径的侧向偏转是侧向倾翻距离。
- 信号控制的人行横道
- 具有停车信号灯的人行横道。信号灯可能使用探测器,在行人靠近或可能存在明确的行人管制时,自动变换信号灯。在英国,该探测器类型被称为海鹦人行横道,非探测器类型被称为鹈鹕人行横道。
- 信号控制的人行横道/自行车骑行者横道
- 专为行人或自行车骑行者通行设计的横道,它使用信号控制来停止车流。在英国被称为犀鸟人行横道。
- 信号控制的人行横道/骑马者横道
- 专为行人或骑马者通行设计的横道,它使用信号控制来停止车流。在英国被称为飞马人行横道。
- 隔离岛
- 隔离岛由入口和出口车道限定线和内切圆的界限形成。
- 隔离岛
- 隔离岛可能包含隔离岛,特别是在存在人行横道的情况下。隔离岛的实际限制通常在隔离岛内。
- 转向角度
- 控制轮轴或联轴器的中心处的假想的车轮的角度。
- 短轴
- 仅支承一侧的车轮的轮轴。
- 短轴长度
- 短轴的长度是从轴心点到车轮组的中心进行测量。
- T 标记
- 一种在每个相邻停车位之间的入口绘制 T 的停车位标记。T 的一竖占据停车位侧面较短的距离,交叉部分位于入口线的中间。
- 串联轮轴
- 请参见“独立转向架”。
- 目标点
- 车辆必须驶过的一个点。
- 犀鸟人行横道
- 请参见“信号控制的人行横道/自行车骑行者横道”。
- 追踪点
- 追踪点是车辆上面必须穿过指定的目标点的点。它是在您使用 AutoDrive 时您移动和定位的车辆上面的点,也是在跟随驾驶模式中位置跟随线条的点。
- 有箍车轮
- 配备轮箍的车轮。
- 无信号控制的人行横道
- 没有信号控制的人行横道。在英国,通常被称为斑马人行横道。
- V1
- 请参见“入口路径速度”。
- V1 最大
- 请参见“最高入口路径速度”。
- V2
- 请参见“循环路径速度”。
- V3
- 请参见“出口路径速度”。
- V4
- 请参见“270 度转弯路径速度”。
- V5
- 请参见“90 度转弯路径速度”。
- 车辆类别
- 使用停车区域的车辆分为几类;具有类似的停车要求的车辆。
- 墙边转弯半径
- 车身可以在其中旋转的最小圆的半径。假定这种情况在应用完全转向锁定时发生。
- 车轮切入
- 表示最大车轮转角的术语(似乎只是美国消防部门在使用)。另请参见“转向角”。
- 车轮直径
- 轮胎外面的直径。
- 车轮止动器
- 在停车位末端放置车轮止动器以防止车辆超出停车位。
- 轮距
- 轮轴上的车轮外面之间的距离。
- 斑马人行横道
- 请参见“无信号控制的人行横道”。