运动仿真接触管理器
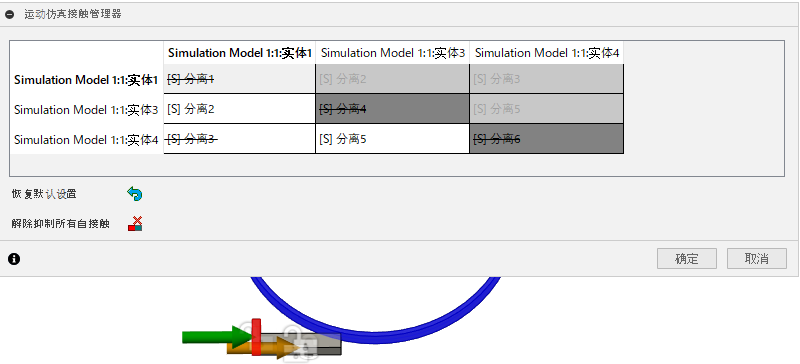
在运动仿真分析中,使用“全局接触”命令为每个实体自动生成接触对。使用运动仿真接触管理器,可以优化接触以缩短分析时间。最初,会在所有实体之间生成接触。若要缩短分析时间,您可以抑制不可能的接触(例如自接触),或在从不彼此接触的实体之间生成的接触。
在运动仿真分析中,使用“全局接触”命令为每个实体自动生成接触对。使用运动仿真接触管理器,可以优化接触以缩短分析时间。最初,会在所有实体之间生成接触。若要缩短分析时间,您可以抑制不可能的接触(例如自接触),或在从不彼此接触的实体之间生成的接触。