“仿真”工作空间中的远程约束
“远程约束”可限制模型从距模型较远的空间点的移动。您可以在模型上定义目标面,定义要固定的自由度以及锚位置或限制移动的空间点。
尝试对更复杂的部件进行建模或简化时,远程约束非常有用。例如,可以使用远程约束来表示远程球联接,而不对整个设计进行建模。
除运动仿真外,所有机械仿真分析均提供远程约束。
固定不同自由度的效果
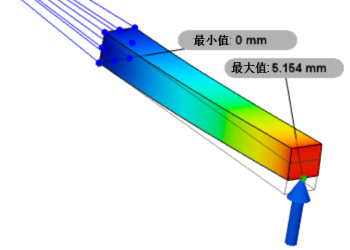 |
(a) 如果对梁的一端应用远程约束,并固定所有六个自由度(Ux、Uy、Uz 和 Rx、Ry 和 Rz),则在对另一端应用载荷时,其行为与固定约束类似。远程约束使用刚性连杆将节点(将其视为刚体)固定到面。如果节点根本不移动或旋转,则实际上您获得了一个完全刚性的连接。 |
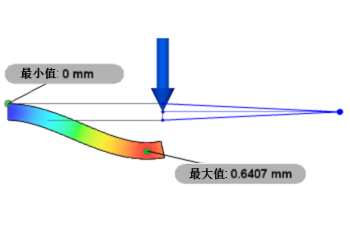 |
(b) 在此示例中,对梁的一端应用固定约束。如果对另一端应用远程约束,并且仅固定平动自由度(Ux、Uy 和 Uz),则在对梁的端面应用载荷时,梁的尖端可以移动和旋转。请注意,面将旋转,以便它始终指向远程约束的位置。 |
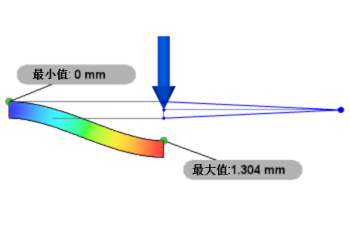 |
(c) 如果仅固定转动自由度(Rx、Ry 和 Rz),并对梁的端面应用载荷,则端部的位移明显大于仅固定平动自由度时的位移。请注意,在这种情况下,面始终保持垂直。 |
图 1:(a) 使用固定所有 6 个自由度的远程约束的位移结果,(b) 固定平动自由度的远程约束的位移结果,以及 (c) 固定转动自由度的远程约束的位移结果。
远程约束的默认设置是完全约束,这类似于应用固定约束。