活动 4:应用规定平动并定义接触
在本活动中,您将对顶板应用 1.6 毫米的规定平动,向下应用 1 秒,以使其在 -Y 方向上移动。然后,您将对分析设置进行调整,以缩短分析时间。为了完成分析设置,您将执行以下操作:
定义要应用规定平动的面
对顶板应用规定平动
定义用于控制规定平动的增强曲线
定义全局接触设置以禁用自接触
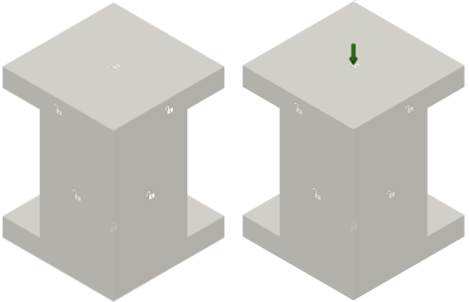
应用规定平动约束之前(左)和应用规定平动约束之后(右)的模型。
前提条件
- 活动 3 已完成。
步骤
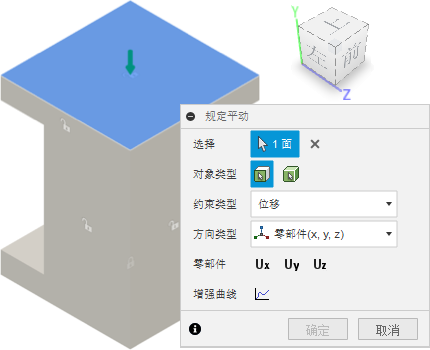
将顶板的顶面定义为要应用规定平动的位置。
注意:在 Fusion 中,规定平动被视为约束而不是载荷,因为它们控制对象的位置。这种平动可将各个零件推到一起。单击
 (“仿真”工作空间 >“设置”选项卡 >“约束”面板 >“规定平动”)以打开“规定平动”对话框。
(“仿真”工作空间 >“设置”选项卡 >“约束”面板 >“规定平动”)以打开“规定平动”对话框。确认“对象类型”已设置为
 “面”。
“面”。确保将“约束类型”设置为“位移”。
单击顶板的顶面以将其标识为“选定对象”。
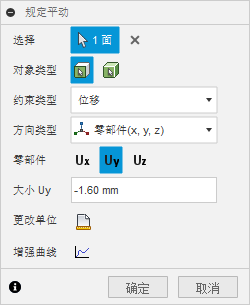
在 -Y 方向上对顶板的顶面应用 1.6 毫米的规定平动。
确认将“方向类型”设置为“分量(x, y, z)”。
单击“Uy”**分量**以选择它。
在“大小 Uy”字段中输入值 -1.60 毫米。
定义“增强曲线”,该曲线使用下图所示的值控制规定平动:
在“规定平动”对话框中,单击
 “增强曲线”。
“增强曲线”。在与第 1 步关联的“倍增”列中输入 1,并在下面一行的“倍增”列中输入 0.75。步会自动递增。
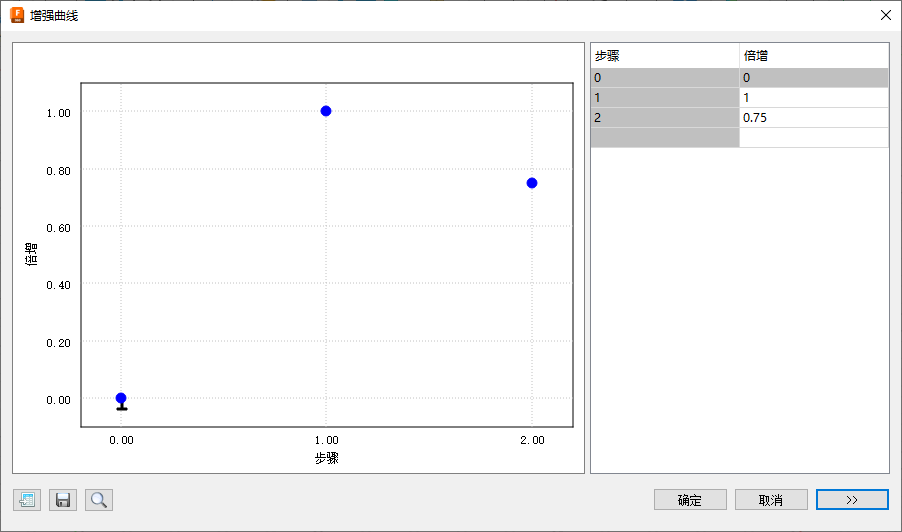 注意:此曲线在第一步应用完整的 1.6 毫米位移,然后在第二步后退到 1.2 毫米。您在开始时定义了每步 10 个结果间隔;经过 2 步,提供了 20 个结果步。
注意:此曲线在第一步应用完整的 1.6 毫米位移,然后在第二步后退到 1.2 毫米。您在开始时定义了每步 10 个结果间隔;经过 2 步,提供了 20 个结果步。单击“确定”以接受该曲线。
单击“确定”以应用规定平动并关闭对话框。
自动检测实体到实体接触对。
在运动仿真分析中,接触对是在实体之间(而不是在各个点、边或面之间)定义的,系统会自动检测这些接触对。支持自接触,即零件可以变形,并借此与自身的不同区域接触。
单击
 (“仿真”工作空间 >“设置”选项卡 >“接触”面板 >“全局接触”)以打开“全局接触”对话框。
(“仿真”工作空间 >“设置”选项卡 >“接触”面板 >“全局接触”)以打开“全局接触”对话框。确认“全局分离接触”已启用,且“近似粘合接触”已禁用。
注意:在仿真过程中,只要两个零件接触,就会发生分离接触交互。这些零件可以沿彼此滑动并自由分离,但不允许彼此穿透。展开“高级设置”,并确认“允许自接触”处于选中状态。
单击“生成”以创建接触对并关闭对话框。
抑制自接触。
在本练习中,我们不希望自接触,因此可以将其禁用以缩短求解时间。
单击
 (“仿真”工作空间 >“设置”选项卡 >“接触”面板 >“管理接触”)以打开“运动仿真接触管理器”对话框。
(“仿真”工作空间 >“设置”选项卡 >“接触”面板 >“管理接触”)以打开“运动仿真接触管理器”对话框。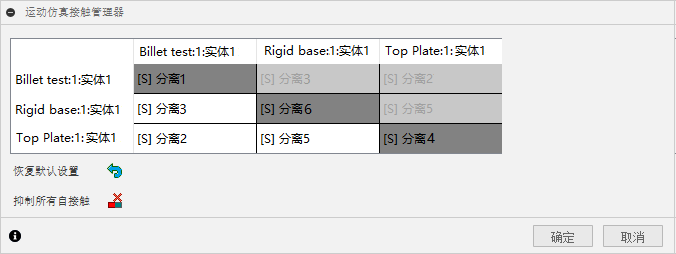 注意:此模型中有三个实体,因此矩阵为 3x3。由于关系是对称的,因此无法选择矩阵上半部分中的单元。
注意:此模型中有三个实体,因此矩阵为 3x3。由于关系是对称的,因此无法选择矩阵上半部分中的单元。单击
 “抑制所有自接触”。
“抑制所有自接触”。请注意,绘制了一条穿过表示自接触的每个对角接触的直线。
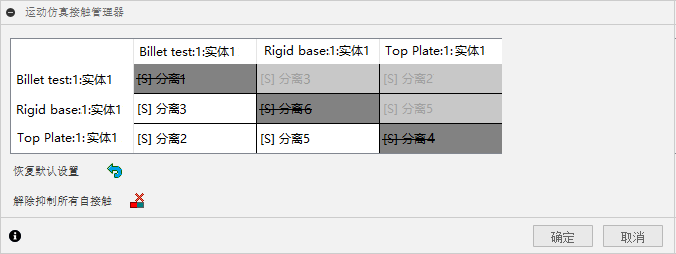
单击其余三个单元中的每个单元,以在画布中亮显每个接触表示的实体。
单击“确定”以关闭“运动仿真接触管理器”对话框,并抑制选定的接触对。
活动 4 概要
在本活动中,您完成了以下任务:
- 定义了要应用规定平动的面
- 对顶板应用了规定平动
- 定义了用于控制规定平动的增强曲线
- 定义了全局接触设置以禁用自接触