关于实景捕获过程
可以通过照片以二维表示法来捕获真实世界,而通过激光扫描以三维表示法来捕获真实世界。可以把它想象成三维照片,但典型的表示法是点云。这些云由精确三维空间中的数百万个彩色点组成。ReCap 可处理这些庞大的数据集,并提供聚合、增强、清理和组织数据的功能,还可以做好准备在其他 Autodesk 产品中使用。

捕获原始扫描或照片数据、优化原始扫描或照片数据以及在 CAD 程序中使用原始扫描或照片数据的路径有三个主要阶段,如下所述。
1.数据捕获
一系列激光扫描或照片提供源数据。

在扫描项目中,点数据是使用三维激光扫描捕获的,并与参考的坐标系对齐。通常,测量公司以扫描仪制造商的原生扫描格式提供正确定向的扫描。
在摄影测量项目(通常简称为照片项目)中,ReCap Pro 会分析一系列照片,以测量对象之间的距离、映射精确的曲面点并创建网格。因此,用户可以通过简单的照片开发在几何上精确的带纹理、高分辨率三维模型。此功能利用 Web 上 Autodesk Drive 中的云服务。
2.ReCap 项目创建
项目创建过程会有所不同,具体取决于您使用的是激光扫描还是照片作为源数据。
导入扫描数据、建立索引并另存为 ReCap 项目。ReCap 将扫描文件转换为其他 Autodesk 程序可以读取的专有实景捕获扫描格式 (RCS)。
在此过程开始时,可以通过更改噪声设置、与相机的距离、强度范围和抽取值来调整导入的点数。将索引的扫描文件保存在引用但不包含这些文件的实景捕获项目文件 (RCP) 中。ReCap 支持导入单扫描或多扫描 E57 文件的结构化扫描(包括 RealView 和注册 [如果适用])。
摄影测量数据包含从无人机 (UAV) 或许多固定相机位置拍摄的数字照片。主要要求是,每张照片的视野与所有侧面的相邻照片重叠,以便捕获主题周围的所有点。将照片导入 ReCap 后,可以查看和编辑图像集,然后开始“照片到三维”缝合或注册过程,从而创建无缝的三维全景场景。缝合可以在 ReCap 中自动进行,但如果您有 ReCap Pro,可以通过指定在两个图像中可见的测量点(例如建筑的精确拐角)来手动优化该过程。
3.组织和分析
测量、过滤、清理和组织场景及其对象。
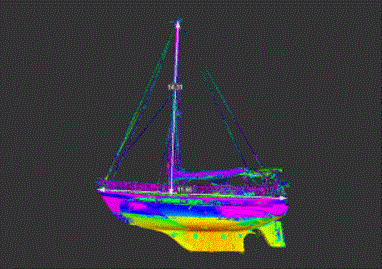
可以使用多种方法来组织索引数据以删除或隐藏部分点云。创建可打开或关闭的扫描区域,指定临时剪裁区域,关闭或删除扫描文件或永久删除不需要的点。通过使用不同的颜色模式和照明查看场景,可以深入了解高程、法线(有助于识别曲面)和反射率。
可以在其他 Autodesk 程序中打开或附着 带索引的扫描文件和项目,以为三维模型提供真实的环境。