E57 导出支持 - 技术规范
此页面指定为每个导出选项写入 E57 中的内容,包括文件级标题、Data3D 结构和 Image2D 附件(如果存在)。
文件级标题和通用约定
- 根结构:E57 文件根包含名为 data3D(每次扫描记录)和 images2D(可选图像附件)的矢量。这些矢量按扫描/图像填充。
- 单位:
- 笛卡尔坐标以米为单位
- 角度以弧度为单位
- 颜色通道使用 8 位限制
- 每次扫描通用元数据 (Data3D):
- description:用户可读的字符串 (
generated by Autodesk ReCap) - GUID:每个扫描的唯一标识符
- name:扫描基本名称
- sensorVendor:源提供的字符串
- pose:以四元数(旋转)和平移表示的刚体变换
- acquisitionStart/acquisitionEnd:设置为导出时间
- colorLimits:对于红色、绿色和蓝色为 0-255
- intensityLimits:按扫描声明;对于非结构化和三维点云 + 全景图像(所有编辑)为 0 - 255,仅对于仅结构化点云(无编辑)为 0 - 65535
- hasNormals:仅当法线可用于扫描时才显示。
- pointsSize:为扫描记录的总点数。
- description:用户可读的字符串 (
非结构化扫描
ReCap 仅使用 Data3D 对象导出非结构化扫描。
标题信息:
- formatName(字符串)
- guid(字符串)
- versionMajor 和 versionMinor(整数)
- creationDateTime
Data3D 结构(矢量):
guid(字符串)
name(字符串)
description(字符串)
sensorVendor(字符串)
intensityLimits(结构):
- intensityMaximum(整数)
- intensityMinimum(整数)
colorLimits(结构):
- colorRedMaximum(整数)
- colorRedMinimum(整数)
- colorGreenMaximum(整数)
- colorGreenMinimum(整数)
- colorBlueMaximum(整数)
- colorBlueMinimum(整数)
pose(结构):
- translation(结构):
- x(浮点)
- y(浮点)
- z(浮点)
- rotation(结构):
- w(浮点)
- x(浮点)
- y(浮点)
- z(浮点)
- translation(结构):
acquisitionStart(结构):
- dateTimeValue(浮点)
- isAtomicClockReferenced(整数)
acquisitionEnd(结构):
- dateTimeValue(浮点)
- isAtomicClockReferenced(整数)
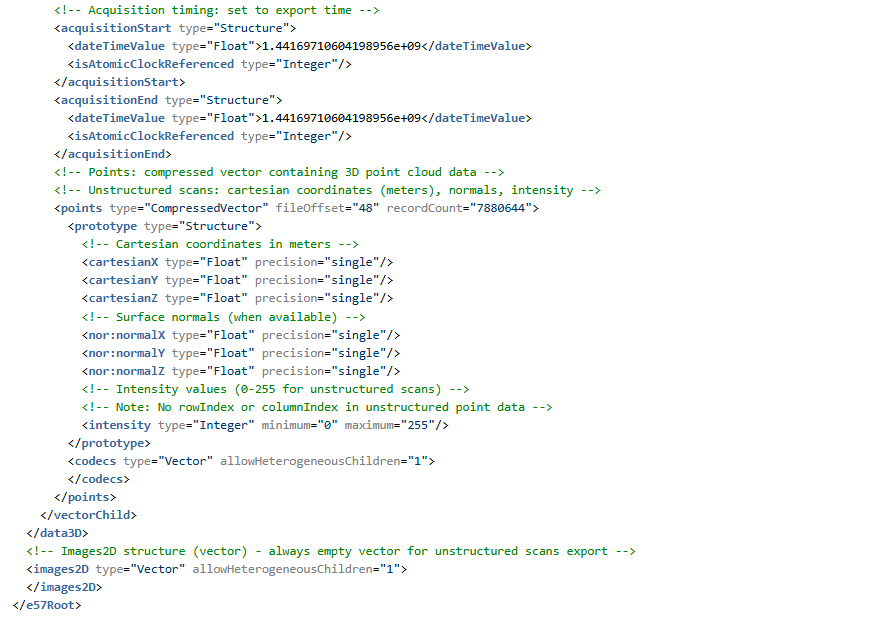
points(压缩矢量):
- cartesianX(浮点)
- cartesianY(浮点)
- cartesianZ(浮点)
- colorRed(整数)
- colorGreen(整数)
- colorBlue(整数)
- intensity(浮点)
- normals(浮点)
XML 样例:
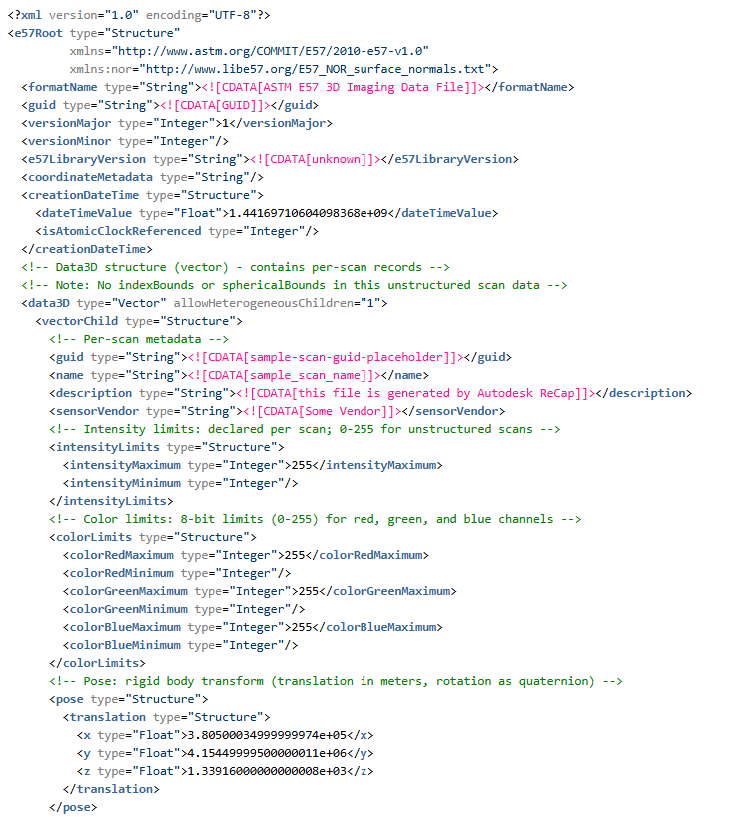
结构化扫描
ReCap 为结构化扫描导出提供了 3 个选项:
- 仅三维点云(所有编辑)
- 仅结构化点云(无编辑)
- 三维点云 + 全景图像(所有编辑)
“仅三维点云(所有编辑)”选项
ReCap 将结构化数据集转换为非结构化数据集,并且仅导出点云数据 (Data3D)。对于输出结构,请随时参考“非结构化扫描”部分。
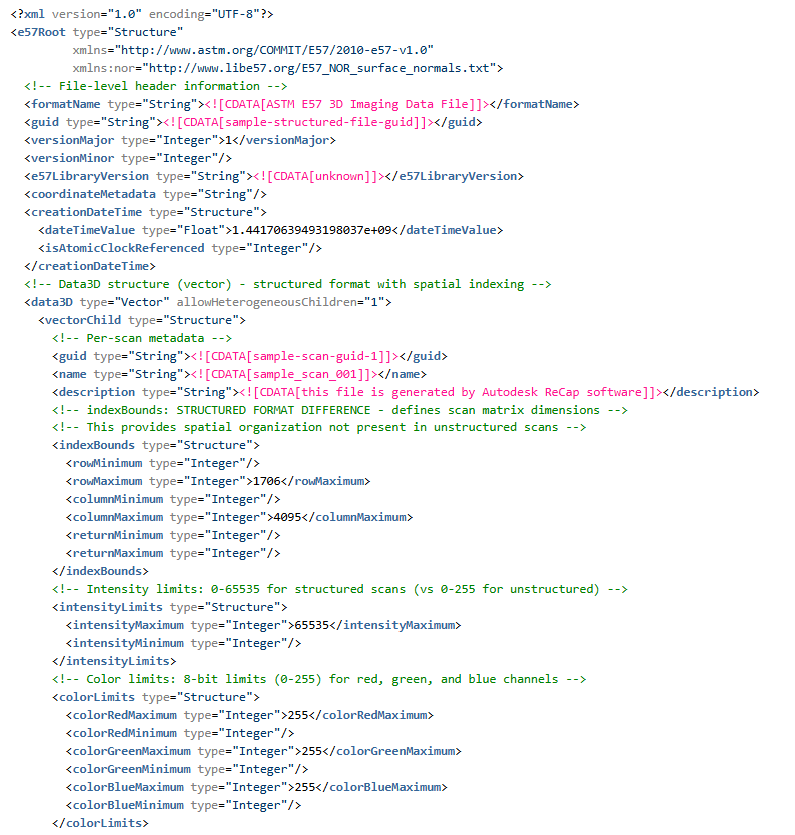
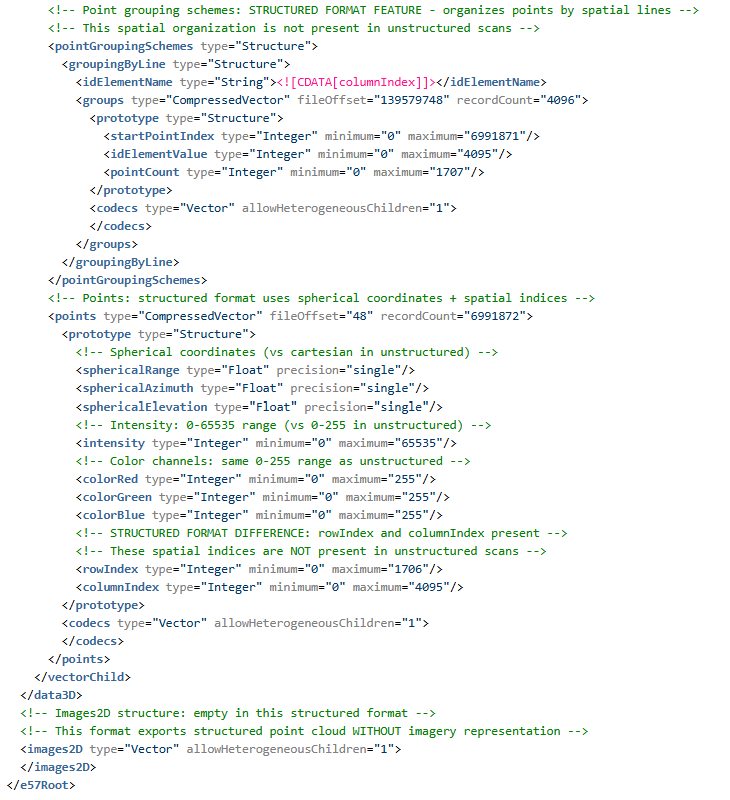
“仅结构化点云(无编辑)”选项
对于此选项,ReCap 会导出具有结构化信息(索引边界)但不包括图像表示的点云。
结构化和非结构化格式之间的主要区别会以粗体文本突出显示。
标题信息:
- formatName(字符串)
- guid(字符串)
- versionMajor 和 versionMinor(整数)
- creationDateTime
Data3D 结构(矢量):
- guid(字符串)
- name(字符串)
- description(字符串)
- sensorVendor(字符串)
- indexBounds(结构):
- rowMinimum(整数)
- rowMaximum(整数)
- columnMinimum(整数)
- columnMaximum(整数)
- returnMinimum(整数)
- returnMaximum(整数)
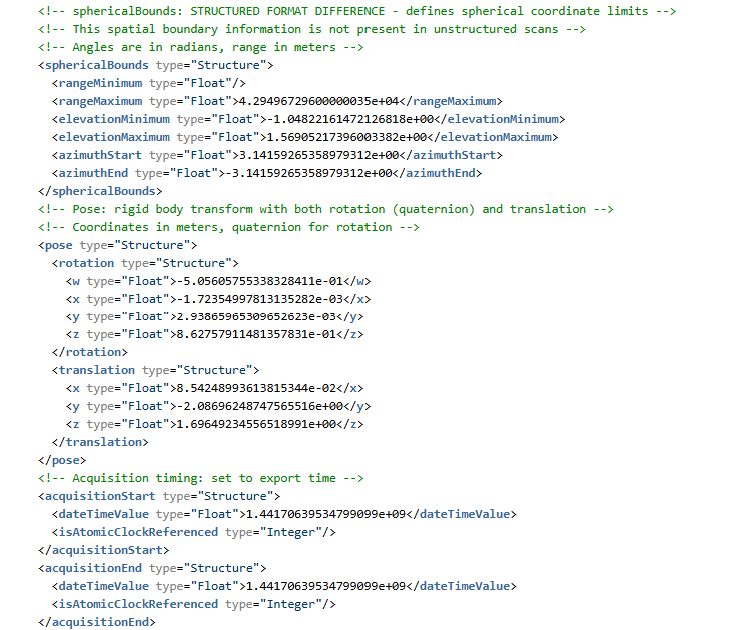
- sphericalBounds(结构)
- rangeMinimum(浮点)
- rangeMaximum(浮点)
- elevationMinimum(浮点)
- elevationMaximum(浮点)
- azimuthStart(浮点)
- azimuthEnd(浮点)
- intensityLimits(结构):
- intensityMaximum(整数)
- intensityMinimum(整数)
- colorLimits(结构):
- colorRedMaximum(整数)
- colorRedMinimum(整数)
- colorGreenMaximum(整数)
- colorGreenMinimum(整数)
- colorBlueMaximum(整数)
- colorBlueMinimum(整数)
- pose(结构):
- translation(结构):
- x(浮点)
- y(浮点)
- z(浮点)
- rotation(结构):
- w(浮点)
- x(浮点)
- y(浮点)
- z(浮点)
- translation(结构):
- acquisitionStart(结构):
- dateTimeValue(浮点)
- isAtomicClockReferenced(整数)
- acquisitionEnd(结构):
- dateTimeValue(浮点)
- isAtomicClockReferenced(整数)
- pointGroupingSchemes(结构):
- groupingByLine(结构):
- idElementName(字符串)
- groups(压缩矢量)
- groupingByLine(结构):
- points(压缩矢量):
- rowIndex(整数)
- columnIndex(整数)
- colorRed(整数)
- colorGreen(整数)
- colorBlue(整数)
- intensity(浮点)
XML 样例:
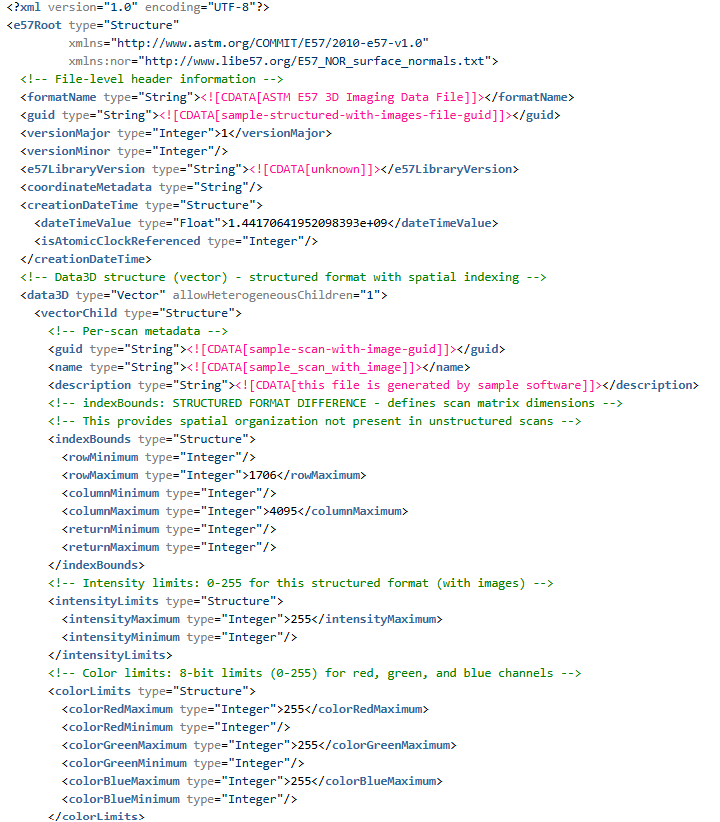
三维点云 + 全景图像(所有编辑)
对于此选项,ReCap 会导出扫描的点云数据和图像表示。
结构化和非结构化格式之间的主要区别会以粗体文本突出显示。
结构:
标题信息:
- formatName(字符串)
- guid(字符串)
- versionMajor 和 versionMinor(整数)
- creationDateTime
Data3D 结构(矢量):
guid(字符串)
name(字符串)
description(字符串)
sensorVendor(字符串)
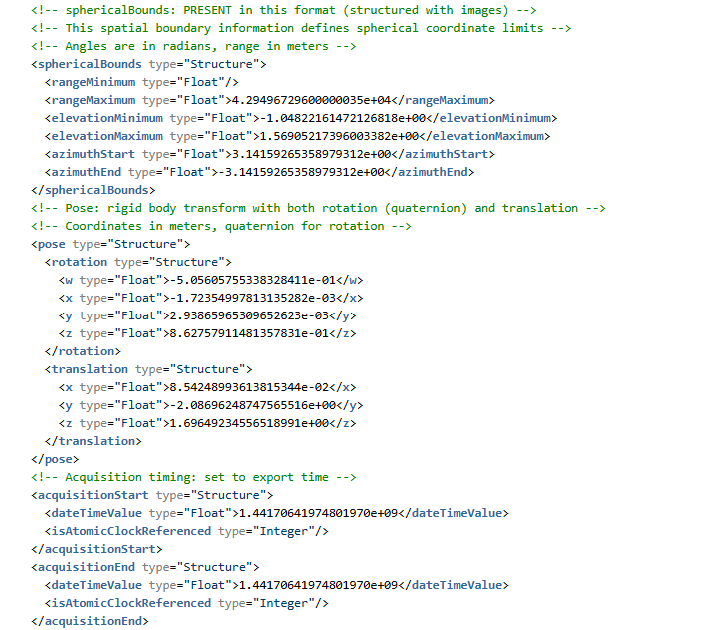
sphericalBounds(结构)
- rangeMinimum(浮点)
- rangeMaximum(浮点)
- elevationMinimum(浮点)
- elevationMaximum(浮点)
- azimuthStart(浮点)
- azimuthEnd(浮点)
intensityLimits(结构):
- intensityMaximum(整数)
- intensityMinimum(整数)
colorLimits(结构):
- colorRedMaximum(整数)
- colorRedMinimum(整数)
- colorGreenMaximum(整数)
- colorGreenMinimum(整数)
- colorBlueMaximum(整数)
- colorBlueMinimum(整数)
pose(结构):
- translation(结构):
- x(浮点)
- y(浮点)
- z(浮点)
- rotation(结构):
- w(浮点)
- x(浮点)
- y(浮点)
- z(浮点)
- translation(结构):
acquisitionStart(结构):
- dateTimeValue(浮点)
- isAtomicClockReferenced(整数)
acquisitionEnd(结构):
- dateTimeValue(浮点)
- isAtomicClockReferenced(整数)
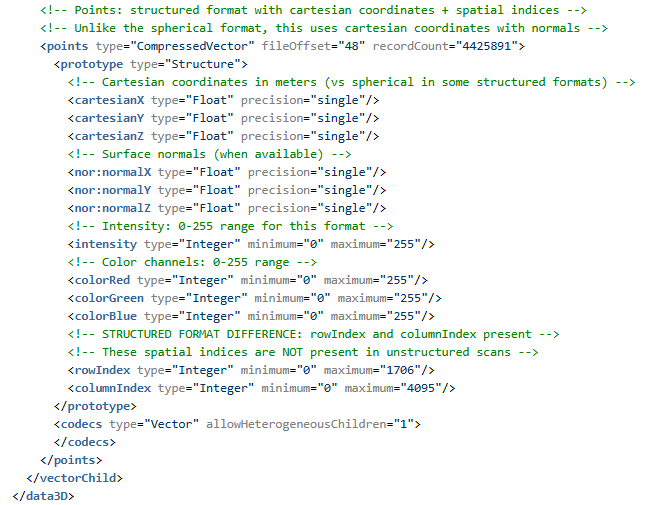
points(压缩矢量):
- cartesianX(浮点)
- cartesianY(浮点)
- cartesianZ(浮点)
- colorRed(整数)
- colorGreen(整数)
- colorBlue(整数)
- intensity(浮点)
- normals(浮点)
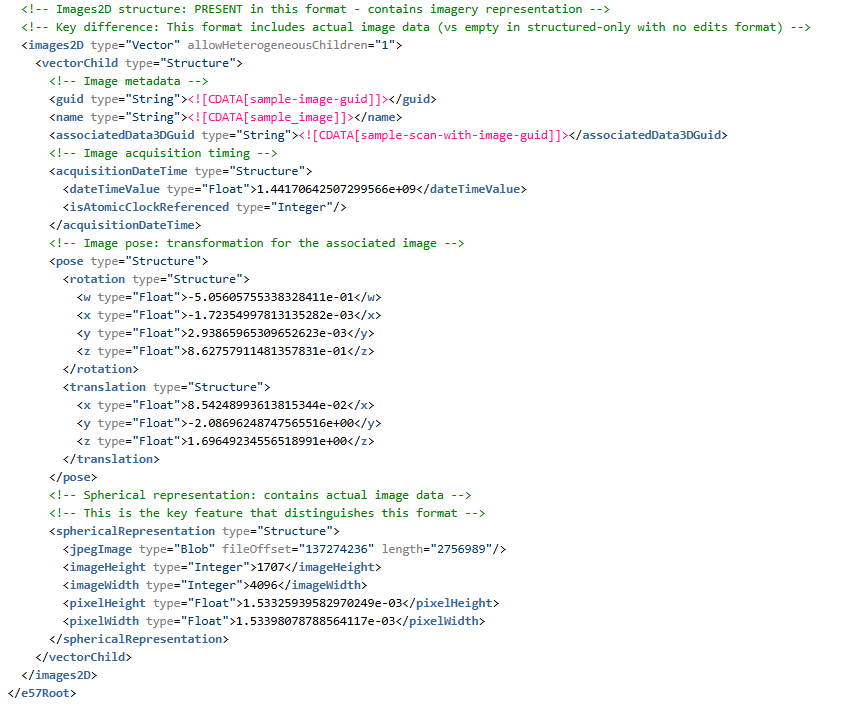
Image2D 结构(矢量)
guid(字符串)
name(字符串)
associatedData3DGuid(字符串)
acquisitionDateTime(结构)
- dateTimeValue(浮点)
- isAtomicClockReferenced(整数)
pose(结构):
- translation(结构):
- x(浮点)
- y(浮点)
- z(浮点)
- rotation(结构):
- w(浮点)
- x(浮点)
- y(浮点)
- z(浮点)
- translation(结构):
sphericalRepresentation(结构):
- jpegImage (blob)
- imageHeight(整数)
- imageWidth(整数)
- pixelHeight(浮点)
- pixelWidth(浮点)
XML 样例: