Directrices para eliminar los modos de cuerpos rígidos
La opción Eliminar los modos de cuerpos rígidos se puede utilizar si se cumple cualquiera de las siguientes condiciones:
El modelo está sin ninguna restricción
Es decir, no se han aplicado restricciones X, Y o Z en ninguna parte del modelo. Cuando el modelo está sin ninguna restricción, las cargas aplicadas pueden estar equilibradas o no equilibradas.
El modelo está restringido,
- Y todas las cargas que actúan en la dirección restringida están equilibradas
- Y la suma de los momentos es igual a cero.
- las cargas NO están equilibradas, cuando se activa Eliminar los modos de cuerpos rígidos, las cargas que se añaden para equilibrar las cargas y los momentos cambian en esencia las fuerzas de reacción y los resultados serían incorrectos.
- las cargas y los momentos ESTÁN equilibrados, cuando se activa Eliminar los modos de cuerpos rígidos, no se aplican más cargas y las fuerzas de reacción y los resultados son correctos.
Tabla 1: Cuándo activar Eliminar modos de cuerpos rígidos.
| ¿El modelo está restringido? | ¿Están equilibradas las fuerzas en las direcciones restringidas? | ¿La suma de los momentos es igual a 0? | ¿Puede utilizar Eliminar los modos de cuerpos rígidos? |
|---|---|---|---|
| No | -- | -- | Sí |
| Sí | Sí | Sí | Sí |
| Sí | Sí | No | No |
| Sí | No | No | No |
Modelo restringido
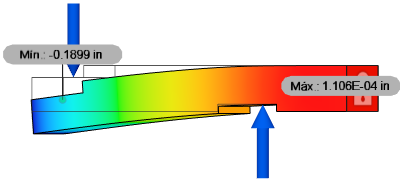
Ejemplo 1: Las cargas están equilibradas, pero la suma de los momentos NO es igual a cero
Supongamos que un modelo tiene restringido el movimiento en la dirección vertical. Se aplica una fuerza de 100 N en esa dirección. El modelo debe tener una fuerza opuesta de 100 N en la dirección contraria, de modo que la suma de las fuerzas en la dirección vertical sea cero. Las cargas que actúan en direcciones sin restricciones pueden estar equilibradas o no.
 |
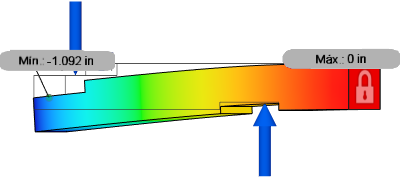 |
| Eliminar los modos de cuerpos rígidos no activado, mostrando la deflexión correcta | Eliminar los modos de cuerpos rígidos activado, mostrando la deflexión incorrecta |
Como los momentos provocados por las fuerzas no son iguales a 0, los resultados serán incorrectos cuando Eliminar modos de cuerpos rígidos esté activado. Observe que el momento de reacción es cero, debido a que el solucionador añade una aceleración rotacional para contrarrestar el momento desequilibrado.
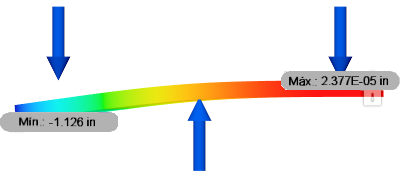
Ejemplo 2: Las cargas están equilibradas Y la suma de los momentos es igual a cero
Supongamos que un modelo tiene restringido el movimiento en la dirección vertical, con una fuerza de 100 N aplicada en direcciones opuestas. (Una fuerza de 100 N apuntando hacia arriba y dos fuerzas de 50 N apuntando hacia abajo). Como el espaciado es igual en este ejemplo, el momento debido a las tres cargas es igual a cero. En este ejemplo se puede utilizar la opción eliminar modos de cuerpos rígidos si es necesario.
 |
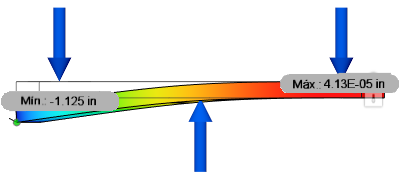 |
| Eliminar modos de cuerpos rígidos no activado, mostrando la deflexión correcta. | Eliminar modos de cuerpos rígidos activado, mostrando la deflexión correcta |
Modelo sin restricciones
Cuando se utiliza Eliminar modos de cuerpos rígidos con un modelo sin restricciones, es importante tener en cuenta si es necesario equilibrar las cargas aplicadas para obtener resultados precisos. En los ejemplos 3 y 4 se muestran dos situaciones. En una de ellas se producen buenos resultados con una carga no equilibrada. En la otra, debe equilibrar las cargas para obtener resultados precisos.
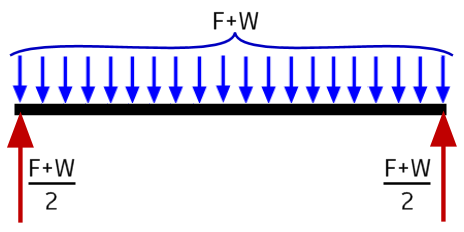
Ejemplo 3: Sin restricciones - Las cargas aplicadas no equilibradas son aceptables
Este ejemplo es una barra cuadrada apoyada de forma sencilla con una fuerza distribuida uniformemente (F) aplicada en toda la longitud de la barra. La reacción en cada extremo es (F + W) / 2, donde W es el peso de la propia barra. Solo se pueden aplicar las fuerzas de reacción a los extremos de la barra (flechas rojas). La aceleración aplicada por el solucionador genera una fuerza (Fa) igual a F + W (flechas azules). Hay una parte de esta fuerza de aceleración que actúa en cada elemento del modelo. La fuerza contraria resultante para la carga aplicada se distribuye uniformemente a lo largo de toda la longitud del modelo.
De forma alternativa, si hace lo siguiente:
- Aplicar la fuerza distribuida (F) a la longitud de la barra
- Activar la carga de gravedad, produciendo la carga de peso (W)
Entonces el resultado será idéntico al del caso sin ninguna restricción. El solucionador solo tiene que aplicar una aceleración muy pequeña para contrarrestar los pequeños desequilibrios matemáticos resultantes del método CEF.
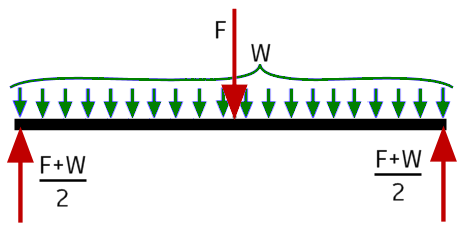
Ejemplo 4: Sin restricciones - Las cargas equilibradas deben aplicarse para obtener resultados correctos
En este ejemplo se aplican cargas equilibradas al modelo, que en teoría proporcionan una condición de equilibrio. El solucionador aplica una cantidad muy pequeña de aceleración global, lo suficiente para contrarrestar el ligero desequilibrio matemático introducido por el método CEF.
Aplique una fuerza grande (F, la flecha roja central) concentrada en el centro del tramo. Active la gravedad para producir la carga de peso (W, las flechas verdes). Por último, aplique las fuerzas de reacción calculadas en los extremos de la barra (las dos flechas rojas exteriores). Cuando hay una carga que actúa en un punto, una arista o un área pequeña de una pieza, el solucionador no puede representarla con precisión aplicando aceleración global. Con la fuerza de la aceleración global distribuida y una fuerza concentrada en el tramo medio no se producen los mismos resultados de tensión o desplazamiento.
Relevante: No se aplica ninguna restricción al modelo en los ejemplos 3 o 4. En la primera fila de la Tabla 1, puede observar que la opción Eliminar modos de cuerpos rígidos está permitida. Sin embargo, las diferencias entre los ejemplos 3 y 4 demuestran que también debe tener en cuenta el potencial efecto de las cargas desequilibradas en la precisión de los resultados.