[剛体モードを解除]を使用する際のガイドライン
[剛体モードを解除]は、次のいずれかの条件に該当する場合に使用できます。
モデルがまったく拘束されていない
つまり、モデルのどの部分にも、X 拘束、Y 拘束、または Z 拘束を適用していないこと。モデルがまったく拘束されていない場合、適用荷重は平衡または不平衡にすることができます。
モデルが拘束されており、
- かつ、拘束された方向に作用するすべての荷重の平衡が保たれており、
- かつ、モーメントの合計がゼロである。
- 荷重の平衡が保たれていない場合、[剛体モードを解除]をアクティブにすると、荷重とモーメントの平衡を保つために追加された荷重によって反力が本質的に変わるため、結果は間違っています。
- 荷重とモーメントの平衡が保たれている場合、[剛体モードを解除]をアクティブにすると、追加の荷重は適用されないため、反力と結果は正しくなります。
表 1: [剛体モードを解除]をアクティブにするタイミング
| モデルが拘束されているか? | 拘束された方向で力の平衡が保たれているか? | モーメントの合計が 0 か? | [剛体モードを解除]オプションを使用できるか? |
|---|---|---|---|
| いいえ | -- | -- | はい |
| はい | はい | はい | はい |
| はい | あり | いいえ | いいえ |
| はい | いいえ | なし | いいえ |
拘束されたモデル
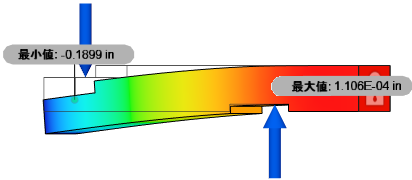
例 1: 荷重の平衡は保たれているが、モーメントの合計がゼロではない
モデルの垂直方向の動作が拘束されていると想定します。その方向に対して 100 N の力が適用されるとします。この場合、垂直方向の力の合計がゼロになるように、反対方向に 100 N の対抗する力がモデルに必要です。拘束されていない方向に作用する荷重は、平衡でも不平衡でもかまいません。
 |
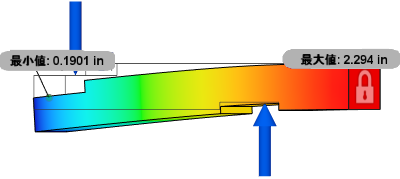 |
| [剛体モードを解除]は無効、正しいたわみを示しています | [剛体モードを解除]は有効、間違ったたわみを示しています |
力によるモーメントが 0 と等しくないため、[剛体モードを解除]が有効になっている場合、結果が正しくありません。ソルバーが回転加速度を追加して不平衡なモーメントを補正しているため、反モーメントはゼロであることに注目してください。
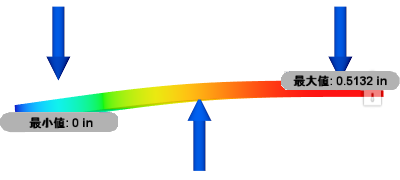
例 2: 荷重の平衡は保たれており、モーメントの合計がゼロである
モデルの垂直方向の動作が拘束されていて、反対方向に 100 N の力が適用されていると想定します(上向き 100 N の力が 1 つと、下向き 50 N の力が 2 つ)。 この例では等間隔であるため、3 つの荷重によるモーメントはゼロに等しくなります。この例では、必要に応じて[剛体モードを解除]オプションを使用できます。
 |
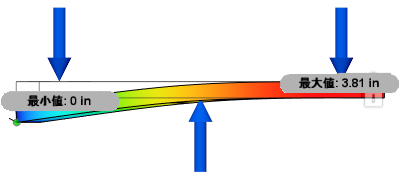 |
| [剛体モードを解除]は無効、正しいたわみを示しています。 | [剛体モードを解除]は有効、正しいたわみを示しています |
拘束されていないモデル
拘束されていないモデルで[剛体モードを解除]を使用する場合でも、正確な結果を得るために適用荷重の平衡を保つ必要があるかどうかを考慮することが重要です。例 3 と例 4 は 2 つの状況を示しています。一方のシナリオでは、不平衡の負荷で良好な結果が得られます。もう一方のシナリオでは、正確な結果を得るために、荷重の平衡を保つ必要があります。
例 3: 拘束なし - 不平衡の適用荷重が許容される場合
この例は、単純支持の正方形のバーです。均一に分散した力(F)がバーの長さ全体に適用されています。両端の反力は (F + W) / 2 です。ここで、W はバー自体の重量です。反力はバーの両端にのみ適用することができます(赤色の矢印)。ソルバーによって適用される加速度により、F + W(青色の矢印)に等しい力(Fa)が生成されます。この加速力の一部が、モデル内のすべての要素に作用します。適用された荷重に対して生じる対抗力は、モデルの長さ全体に沿って均一に分散されます。
![[剛体モードを解除]の図](../images/diagram/remove-rigid-body-1.png)
代わりに、次の 2 つの操作を実行するとします。
- バーの長さに分散力(F)を適用する
- 重力荷重をアクティブにして重量荷重(W)を生成する
すると、完全に拘束されていない場合とまったく同じ結果になります。ソルバーは、非常に小さい加速度を適用するだけで、FEA 法に起因する小さい数学的不平衡に対抗することができます。
例 4: 拘束なし - 正しい結果を得るために平衡荷重を適用しなければならない場合
この例では、モデルに平衡荷重を適用します。これにより、理論的には平衡状態になります。ソルバーは、FEA 法により生じるわずかな数学的不平衡に対抗するだけの、非常に小さいグローバル加速度を適用します。
大きな力(F、中央の赤色の矢印)を適用し、長さの中心に集中させます。重力をアクティブにして重量荷重(W、緑色の矢印)を生成します。最後に、計算された反力(外側の 2 つの赤色の矢印)をバーの両端に適用します。点、エッジ、またはパーツの小さな領域で荷重を作用させた場合、ソルバーは、グローバル加速度を適用してその荷重を正確に表現することができません。グローバル加速度からの分散力と中央の集中力では、同じ応力や変位の結果が生成されません。
![[剛体モードを解除]の図](../images/diagram/remove-rigid-body-2.png)
関連事項: 例 3 または例 4 のいずれでもモデルに拘束は適用されていません。表 1 の最初の行から、[剛体モードを解除]オプションを使用できることがわかります。ただし、例 3 と例 4 との違いは、結果の精度について、不平衡荷重の影響の可能性についても考慮しなければならないことを示しています。