[リンク]タブでは、ワークピースからの進入または退避の方法を定義します。これらの設定すべてがツールパスに影響します。
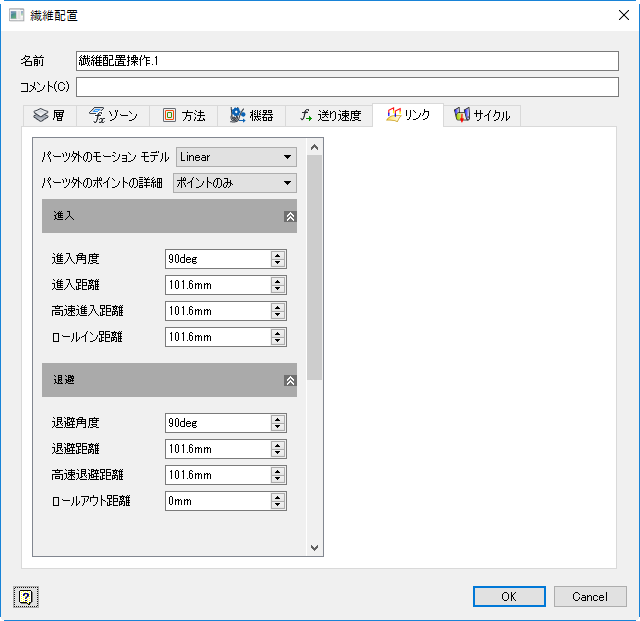
パーツ外のモーション モデル
層に使用するパーツ外のモーション方法を記述します。ダイアログ ボックスの[進入]の値が進入モーションの処理方法をコントロールします。
- リニア(Linear)
- [退避距離]、[進入距離]、[高速退避距離]、および[高速進入距離]の値を使用する点間のモーションになります。
- [安全面]
- セットアップで定義された安全面からの退避および進入モーションになります。退避距離および進入距離を越えるモーションはすべて高速です。このオプションは、セットアップで安全面が定義されている場合にのみ選択できます。
パーツ外のポイントの詳細
これは、パーツ外のモーションの軌道にある点ごとに生成される情報量をコントロールします。ダイアログ ボックスの[退避]の値が退避モーションの処理方法をコントロールします。
- [ポイントのみ]
- チップの点のみが計算され、方向の補間はポストプロセッサに委ねられます。
- [ポイントと法線]
- 各点のチップの点およびツールの軸が計算されます。ポストプロセッサは、各点のヘッドの回転を決定します。
- [すべてのベクトル]
- チップの点、ツールの軸、および接線ベクトルを使用して点が完全に定義されます。
進入の値
- [進入角度]
- サーフェスに進入するときに使用される傾斜角度です。90 度はサーフェスに対する法線です。
- [進入距離]
- [進入角度]に沿ったサーフェスからの距離です。進入が開始する場所を示します。
- [高速進入距離]
- これを使用するパーツ外のモーション モデルで距離をコントロールします。[進入距離]で定義された距離から開始し、指定された距離で終了します。この移動距離の間は、退避モーションからのリンク後にサーフェスの法線に沿って高速送り速度が使用されます。このオプションは、[パーツ外のモーション モデル]が[直線]、[次のサーフェス]、[円筒形]、[円弧の補間]、または[回転平面]でない場合は無効になります。
- [ロールイン距離]
- コースの最初のけん引が追加されるまでサーフェスに沿ってロールする距離です。
退避の値
- [退避角度]
- サーフェスから退避するときに使用される傾斜角度です。90 度はサーフェスに対する法線です。
- [退避距離]
- [退避角度]に沿ってサーフェスから退避する距離です。
- [高速退避距離]
- これを使用するパーツ外のモーション モデルで距離をコントロールします。[退避距離]で定義された距離から開始し、指定された距離で終了します。この移動距離の間は、進入モーションへのリンクまでサーフェスの法線に沿って高速送り速度が使用されます。このオプションは、[パーツ外のモーション モデル]が[直線]、[次のサーフェス]、[円筒形]、[円弧の補間]、または[回転平面]でない場合は無効になります。
- [ロールアウト距離]
- コースの最後のけん引をレイアウトしてからサーフェスに沿ってロールする距離です。