迄今为止,机械装置是无磨损的,即它们在运行时不会受到摩擦或阻尼效应(通常都会遭受到)。我们现在将添加摩擦以获得操作环境。
添加摩擦并完成牛轭-导向关系。
- 在浏览器中,在“Blade set.iam”上单击鼠标右键,然后单击“柔性”。通过将部件设定为“柔性”,该部件将放置到焊接组文件夹中。在该部件中,将对约束进行评估,而牛轭和刀片之间的约束将导致添加旋转联接。
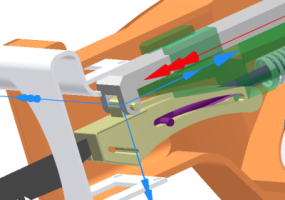
- 如前面所述,该部件尚无摩擦。该步骤将在平移运动类型上施加摩擦。在 Guide 和 Scottish Yoke 的“平移运动类型”上单击鼠标右键,然后单击“特性”。
- 单击“自由度 1 (T)”选项卡。
- 单击“编辑约束条件”命令
 。
。 - 单击“启用约束条件”。
- 输入“干摩擦系数”0.1,然后单击“确定”。
- 现在,您必须添加约束,以相对曲柄部件定位 Scottish Yoke。退出仿真环境并单击“部件”选项卡。
- 将浏览器视图设定为“模型”,并展开 Blade set.iam 节点。
- 展开 Scottish Yoke 节点,然后单击“约束”命令。
- 在浏览器中,选择 Scottish Yoke 零部件下的“工作平面3”。
- 在图形窗口中,选择“滚柱”零部件的环形边,该零部件是曲柄凸轮部件的组成部分。将添加点-面运动类型来反应约束。
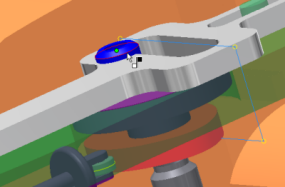
- 单击“确定”以添加约束,并关闭对话框。
- 将浏览器视图设定回“运动仿真”。
所得的点-面运动类型具有五种自由度和一个约束。这样的定义足够进行传动并且不会过约束模型。运动仿真会检测过约束的条件并帮助您解决它们。