設定這些選項後,它們對動力學模擬的影響將一直持續到您對其進行變更為止。開啟「動力學模擬」後立即設定選項。
- 在功能區中,按一下
「環境」頁籤
 「開始」面板
「動力學模擬」
顯示「動力學模擬」面板。
「開始」面板
「動力學模擬」
顯示「動力學模擬」面板。 - 然後,按一下
「動力學模擬」頁籤
「管理」面板
「模擬設定」
 。
。 - 按一下「自動將約束轉換為標準接頭」以將自動動力學模擬轉換器 (約束減少引擎,即 CRE) 設定為打開。
預設為打開。
按一下「確定」後,CRE 會自動將組合約束轉換為標準 接合 ,並在下次開啟此機構時更新所轉換的接合。
- 如果您想要在機構被過度約束時收到警告,請按一下「機構受到過度約束時發出警告」。
雖然此設定是新機構的預設設定,但是對於在 2008 版本之前建立的機構並未依預設啟用。啟用此選項後,如果機構受到過度約束,則當按一下「確定」後,在自動建立標準接頭之前,軟體將顯示一則訊息。
- 如果您要取得對不同移動群組中所包括元件的視覺指示,請勾選「移動群組著色」勾選方塊。會將預先定義的顏色取代指定給同一移動群組中的元件。此選項有助於分析元件關係。若要使元件返回至其正常指定的顏色,請清除設定對話方塊中的勾選方塊,或者在「移動群組」節點上按一下右鍵並選取「移動群組著色」
- 如果您想將自由度的所有初始位置均設定為 0 而不變更機構實際位置,請按一下「所有初始位置均位於 0,0 處」
 。
。 這有助於在輸出圖表產生器中檢視從 0 處開始的可變出圖。
- 按一下「全部重置」
 以將所有座標系統重置為在
接合座標系統
建構期間提供的初始位置。
以將所有座標系統重置為在
接合座標系統
建構期間提供的初始位置。 此設定為預設設定。
- 按一下
「AIP 應力分析」
,以準備用於透過 AIP 應力分析進行分析的所有 FEA 資訊。
此功能可將與 FEA 相關的資料儲存在所選零件的零件檔中。
- 或者,按一下
「ANSYS 模擬」
以準備包括所有要匯出至 ANSYS 之 FEA 資訊的檔案。
此功能可將與 FEA 相關的資料儲存於 ANSYS 可以讀取的檔案中。
- 在文字輸入方塊中,輸入您要保留 FEA 資訊且要匯出至 ANSYS 的檔案名稱。
- 或者,按一下「儲存位置」,以指定既有檔案或建立一個檔案。
如果選取既有檔案,則軟體將覆蓋檔案中目前儲存的所有資料。
註: 如果使用 Ansys Workbench 版本 10 或 11,請執行其他檔案修改。開啟文字檔案,找到標題為「慣性狀態」的部分。在此部分中,有兩行是必須移除的。這兩行為「Grounded」和相關聯的代碼 (後面一行為「0」或「1」)。
- 按一下
 「更多」以查看更多性質。
「更多」以查看更多性質。 - 若要在您產生的 AVI 檔案上顯示版權資訊,請按一下「在 AVI 上顯示版權資訊」,並在文字輸入方塊中輸入版權資訊。
- 按一下「以每分鐘迴轉數 (rpm) 為單位輸入角速率」可以 rpm 為單位輸入角度速度。
然而,輸出是以選取空組合檔時定義的單位進行輸出。
- 若要設定圖形視窗中 3D 框架的組合座標系統 Z 軸線的長度,請在 Z 軸線大小編輯方塊中輸入百分比值。
依預設,Z 軸線大小等於邊界框對角線的 20%。
- 按一下「確定」或「套用」。
均可以儲存設定,但是按一下「確定」會同時關閉該對話方塊。
微機構模型
此選項旨在使用質量性質值較小的機構。
在標準模式中,如果質量小於 1e-10 kg 或慣性小於 1e-16 kg.m2,則計算將失敗。因此將使用精確度設為 1e-10 (小於此值時,軸心將設定為 0) 的高斯程序解析動力學方程式。
啟用微機構模式時,質量必須大於 1e-20 kg 且慣性必須大於 1e-32 kg.m2。高斯精確度設為 1e-32。
若要確定何時啟用此選項,請檢查接頭座標系統中提供的質量性質。
- 如果存在轉換自由度,我們會檢查質量。
- 如果存在沿 X 軸線的旋轉自由度,我們會檢查沿 X 軸線的主要慣性 Ixx,但不檢查交叉慣性 Ixz 和 Ixy,因為在此處不需要關注它們。
|
範例 1 |
|
| 對於最小零件質量 m = 6.5e-9 kg、主要慣性 Ixx = 1e-20 kg/m2、Iyy = 1e-20 kg.m2 的機構 (即使 Izz 大於 1e-10 kg.m2 的慣性限制) 而言: | |
|
|
組合精確度
僅適用於封閉迴路和 2D 接觸的情況。
2D 接觸:定義接觸點之間允許的最大距離。預設值為 1e-6m = 1μm。
- 龍格 - 庫塔法的步驟結束時永遠檢查此距離。
- 如果這些點之間的距離未超出組合精確度,則將接受位置和速度,並繼續計算積分誤差估計。
- 如果距離超出組合精確度,則會修正位置,直到距離不超出組合精確度為止。然後,根據這些新位置來修正速度,並繼續計算積分誤差估計。
封閉迴路:與 2D 接觸相同,但是根據接頭類型也可以具有角度約束 (以弳度表示)。
- 龍格 - 庫塔法步驟結束時會檢查距離約束和角度約束。
- 如果距離約束未超出組合精確度,並且角度約束未超出組合精確度與 1e3 的乘積 (組合精確度以公尺表示),則將接受位置和速度,並繼續計算積分誤差估計。
- 否則會修正位置,直到距離約束不超出組合精確度且角度約束不超出組合精確度與 1e3 的乘積為止。然後會修正速度,並繼續計算積分誤差估計。
修改組合精確度
組合精確度參數可在以下情況中進行修改:
- 在模擬開始時或模擬執行期間無法組合機構。首先,檢查機構的可行性 (檢查要求的位置是否現實、機構是否可達到該位置。檢查可導致位置發生衝突的強制運動)。如果沒有偵測到任何問題並且機構的規模很大 (大約 1m 左右),則提高組合精確度 (1e-5m 或 1e-4m)。如果規模很小 (少於 10 mm),則降低組合精確度 (1e-7m 或 1e-8m)。
- 如果機構小於 1 mm,請降低組合精確度 (1e-8m 至 1e-10m) 或使用微機構模型。
解析器精確度
動力學方程式透過五次龍格 - 庫塔積分規則來求積分。為了取得可以接受的結果,可按照以下方式處理積分誤差和時間步長:
- 在龍格 - 庫塔法每步結束時,可根據所計算的速度和加速度來估計積分誤差。
- 比較此積分誤差與使用者定義的參數「解析器精確度」。
- 如果積分誤差沒有超出解析器精確度,則步長是可接受的,然後繼續計算積分。
- 如果積分誤差超出解析器精確度,則步長將被拒絕。然後,將計算小於實際時間步長的新時間步長,並使用新的時間步長值重新開始進行模擬。
透過龍格 - 庫塔公式的某些性質來估計積分誤差。這可使您輕鬆地將位置「p」和速度「v」計算到五次 (向量分別記為「p5」和「v5」) 和四次 (向量分別記為「p4」和「v4」)。然後按照如下方法定義位置和速度的積分誤差:
|
Integ_error_position = norm(p5 - p4) Integ_error_velocity = norm(v5 - v4) 其中 norm 表示特定範數。 |
接受步長時,存在以下關係 (以公制單位表示):
|
Integ_error_position = norm(p5 - p4) < Atol + | p5 | . Rtol Integ_error_velocity = norm(v5 - v4) < Atol + | v5 | . Rtol |
其中:
| Atol | Rtol | |
|---|---|---|
|
轉換自由度 |
解析器精確度 預設 = 1e-6 沒有最大值 |
解析器精確度 預設 = 1e-6 沒有最大值 |
|
旋轉自由度 |
解析器精確度1e3 預設 = 1e-3 最大值 = 1e-2 |
解析器精確度1e3 預設 = 1e-3 最大值 = 1e-2 |
為闡明此過程,請參閱以下範例:
|
範例 1:闡明相對誤差 Rtol |
|
|
接頭類型:滑棒接頭 1,其位置和速度分別為 |
|
|
p[1] = 4529.289768 m v[1] = 18.45687455 m/s |
|
|
如果解析器精確度設為 1e-6 (預設),則結果會保證六位數: |
|
|
p[1] = 4529.28 m v[1] = 18.4568 m/s |
|
|
如果解析器精確度設為 1e-8,則會保證八位數: |
|
|
p[1] = 4529.2897 m v[1] = 18.456874 m/s |
|
|
範例 2:闡明 Atol 的相對誤差 |
|
|
接頭類型:滑棒接頭 1,其位置和速度分別為 |
|
|
p[1] = 0.000024557 m v[1] = 0.005896476 m/s |
|
|
如果解析器精確度設為 1e-6 (預設),則結果會保證小數點後有六位數: |
|
|
p[1] = 0.000024 m v[1] = 0.005896 m/s |
|
|
如果解析器精確度設為 1e-8,則會保證小數點後有八位數: |
|
|
p[1] = 0.00002455 m v[1] = 0.00589647 m/s |
|
| 此推論也適用於銷接頭,但是對於 Atol 和 Rtol,解析器精確度將與 1e3 相乘。 | |
|
範例 3:闡明 Rtol 的相對誤差 |
|
|
接頭類型:銷接頭 2,其位置和速度分別為 |
|
|
p[2] = 12.53214221 rad v[2] = 21.36589547 rad/s |
|
|
如果解析器精確度設為 1e-6 (預設),則結果會保證三位數: |
|
|
p[2] = 12.5 rad v[2] = 21.3 rad/s |
|
|
如果解析器精確度設為 1e-8 (預設),則會保證五位數: |
|
|
p[2] = 12.532 rad v[2] = 21.365 rad/s |
|
解析器精確度參數可在以下情況中進行修改:
- 模擬停止,顯示錯誤訊息,且時間步長小到足以保證結果良好。如果位移較小,則降低解析器精確度。如果位移較大,則提高解析器精確度。
- 當 2D 接觸已啟用時 (狀態 = 1)。如果力較小,則降低解析器精確度。如果力較大,則提高解析器精確度。這對衝擊情況下的力無效。
- 使用小機構時 (小於 1 mm)。在這些情況下,降低解析器精確度或勾選「微機構模型」選項。
擷取速度
該參數用於模擬物件之間的撞擊。它可幫助解析器在産生持續接觸結果之前限制微小反彈次數。衝擊模型使用恢復係數「e」。其值由使用者指定,介於 0 至 1 之間。對於結果的不同情況,對值的分析如下:
- 當 e = 0 時,能量消耗最大。例如,如果一個球從初始高度、沒有初始速率並在重力作用下落到平面上,結果沒有明顯的反彈,則接觸狀態 = 1。
- 當 e = 1 時,沒有能量消耗。以此球為例,如果球反彈回其初始位置,則接觸狀態 = 0.5,此移動具有周期性,並永遠繼續下去。
- 當 e>0 且 e<1 時,每次撞擊均有能量消耗。還以此球爲例,如果產生反彈,但是反彈高度在每次撞擊之後都會降低,直到最終停在平面上 (此時接觸狀態 = 1),對於這種狀況,可以使用擷取速度。
擷取速度參數可幫助解析器在將接觸視為有效或持續的接觸之前限制微小反彈次數。擷取過程如下所述:
- 將所有恢復係數均設定為其初始值後計算撞擊。
- 比較撞擊後的相對速度 (表示彈回的速度) 與所有接觸的擷取速度參數。
- 如果所有相對速度都大於擷取速度或為零,則此撞擊是可接受的,解析器會立即將新速度用作初始參數繼續計算。
- 如果相對速度小於擷取速度且不為零,則會對該接觸強制使用 e = 0,以使能量損耗最大,然後再次計算撞擊。如果撞擊是可接受的,則會將所有恢復係數均重置為其初始值。
何時可以修改參數?
可在以下情況中修改此參數:
- 具有 2D 接觸並且模擬較慢。請停止模擬,然後出圖擷取速度。如果此參數在每個時間步長內不一致 (在 0 - 1 - 2 之間變化) 或者等於 1,則表示出現擷取問題。解析器會嘗試使接觸狀態穩定,但是這需要較長時間,並且過程很複雜。在此情況下,請增大擷取速度。
- 減小參數值並無益處。
調整速度
在 2D 接觸中使用非線性庫侖摩擦規則。在接頭和 3D 接觸中,為了簡單以及避免超靜態的情況,使用調整後的庫侖規則,如下圖所示:
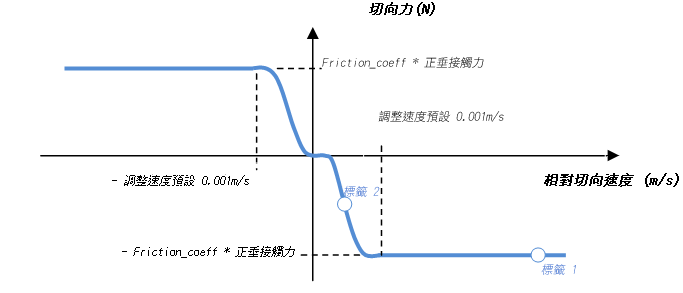
調整由速度調整參數決定。
使用此模型,在粘著接觸 (或滾動接觸) 的情況下,如果相對切向速度等於零,則切向力為零。
對於旋轉自由度中的接頭摩擦,切向力將由切向扭矩 (單位:Nm) 取代,切向相對速度由旋轉速度 (單位:rad/s) 取代,接合半徑乘以切向力可計算出切向扭矩,轉換速度除以接頭半徑可計算出旋轉速度。
|
範例 1 |
|
|
引導半徑為 10 mm 的銷接頭,使其具有 10 rad/s 的固定速度「w」。向接頭施加 20 N 的力 (Fn),方向垂直於其旋轉軸線,並將摩擦係數 (mu) 設為 0.1。 在此情況下,接頭中的摩擦扭矩 (Uf) 可按如下方法計算: |
|
|
? = r * w = 0.01 * 10 = 0.1 m/s ? > 調整速度 = 0.001 m/s => Uf = -mu * r * Fn = -0.1 * 0.01 * 20 = -0.02 Nm 請參閱調整之庫侖圖表中的「標籤 1」。 |
|
|
範例 2 |
|
|
使用同一範例,不過速度 (w) 改為 0.05 rad/s,則摩擦扭矩 (Uf) 的計算方法為: |
|
|
? = r * w = 0.01 * 0.05 = 0.0005 m/sm ? > 調整速度 = 0.001 m/s => Uf ≈ -mu * r * Fn/2 = -0.1 * 0.01 * 20/2 = -0.01 Nm 請參閱調整之庫侖圖表中的「標籤 2」。 |
|
調整速度參數可在以下情況中進行修改:
- 模擬較慢,並在具有摩擦的接頭或 3D 接觸接頭中出現微小振動。接頭中的摩擦或 3D 接觸會在模型中建立極大的剛性,以便解析器減小時間步長以保持可靠的精確度。您必須減小剛性 => 將調整速度參數乗以係數 5 以增大此參數 (5e-3 m/s)。如果模型速度仍然較慢,您可以使用與模型相關的值 (低於模型中的速度) 繼續增大參數。
- 請勿顯著增大調整速度,否則它將只在這些值之間作業。摩擦力永遠不會達到其最大值。這將導致人為地限制摩擦影響。
數值驗證
在分析模擬結果之前,檢查模擬數值是否有效 (模擬對數值參數是否敏感) 很重要。若要執行數值驗證的步驟,請執行以下作業:
- 使用一組數值參數 (解析器精確度和組合精確度、擷取速度、調整速度和時間步長) 來執行模擬,然後儲存此模擬。
- 將每個參數分別除以 10,然後執行模擬並儲存。
- 在同一圖形中出圖所有結果。如果所有結果都是收斂的,則模擬對數值參數不敏感。否則,將出現模擬對數值參數敏感的問題。
- 如果模擬不敏感,則可對結果進行分析。
- 如果模擬對數值參數敏感,請透過結果曲線來確定導致敏感的數值參數。將該參數除以 10,將結果做為此數值參數的標稱值。然後從頭重新開始驗證。若要節省時間,您可以驗證對一個參數是否敏感。
 展示如何重置自由度的初始位置
展示如何重置自由度的初始位置
展示如何動態更新元件的初始位置