Der Mechanismus ist bislang verlustfrei, d. h., es entsteht keine Reibung oder Dämpfung, wie dies normalerweise der Fall wäre. Sie fügen daher nun Reibung hinzu, um die Betriebsbedingungen widerzuspiegeln.
Hinzufügen von Reibung und Fertigstellen der Beziehung zwischen Joch und Führung
- Klicken Sie im Browser mit der rechten Maustaste auf Blade set.iam, und wählen Sie Flexibel. Indem Sie die Baugruppe als flexibel definieren, wird diese in den Ordner für geschweißte Gruppen eingefügt. Innerhalb dieser Baugruppe werden die Abhängigkeiten ausgewertet, und aufgrund der Abhängigkeit zwischen dem Joch und dem Sägeblatt wird ein Drehgelenk hinzugefügt.
- Wie bereits erwähnt hat die die Baugruppe noch keine Reibung. In diesem Schritt wird die Reibung am prismatischen Gelenk festgelegt. Klicken Sie mit der rechten Maustaste auf das prismatische Gelenk für die Führung und das Scottish Yoke, und wählen Sie Eigenschaften.
- Klicken Sie auf die Registerkarte Freiheitsgrad 1 (T).
- Klicken Sie auf den Befehl Gelenkkraft bearbeiten
 .
. - Klicken Sie auf Gelenkkraft aktivieren.
- Geben Sie einen Koeffizienten für trockene Reibung von 0,1 ein, und klicken Sie auf OK.
- Jetzt müssen Sie eine Abhängigkeit hinzufügen, um das Scottish Yoke in Bezug auf die Kurbelscheibenbaugruppe zu positionieren. Beenden Sie die Simulationsumgebung, und klicken Sie auf die Registerkarte Baugruppe.
- Aktivieren Sie im Browser die Modellansicht, und erweitern Sie den Knoten Blade set.iam.
- Erweitern Sie den Knoten Scottish Yoke, und klicken Sie auf den Befehl Abhängig machen.
- Wählen Sie im Browser unter der Komponente Scottish Yoke dein Eintrag Arbeitsebene 3.
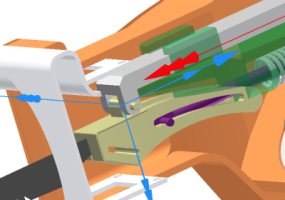
- Wählen Sie im Grafikbereich eine kreisförmige Kante der Rollenkomponente aus, die Bestandteil der Kurbelscheibenbaugruppe ist. Es wird ein Gelenk Punkt-Ebene hinzugefügt, um die Abhängigkeit darzustellen.

- Klicken Sie auf OK, um die Abhängigkeit hinzuzufügen und das Dialogfeld zu schließen.
- Kehren Sie im Browser zur Ansicht der Dynamischen Simulation zurück.
Das resultierende Gelenk Punkt-Ebene weist fünf Freiheitsgrade und eine Abhängigkeit auf. Es ist somit ausreichend definiert, um die Bewegung zu übertragen, ohne dass das Modell überbestimmt wird. Die dynamische Simulation erkennt überbestimmte Bedingungen und unterstützt Sie bei deren Auflösung.