Después de crear el ensamblaje y de añadir una o varias uniones estándar, puede insertar otras uniones (giratorias, deslizantes, de contacto 2D y de fuerza) entre dos componentes que tengan uno o más grados de libertad entre sí. Estas uniones deben insertarse manualmente; a diferencia de las uniones estándar, otras uniones no pueden crearse automáticamente mediante la conversión de restricciones . Las uniones de estas categorías restringen uno o varios de los grados de libertad creados por uniones estándar.
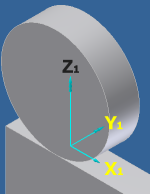 |
Las uniones giratorias, al igual que las deslizantes, pueden cerrar bucles cinemáticos y, salvo las uniones cónicas, pueden utilizarse en componentes con movimiento 2D relativo entre sí. El software coloca los sistemas de coordenadas de las uniones en el punto de contacto. El movimiento de la unión se produce en el plano definido por los vectores Z 1 (normal) y X 1 (tangente). El plano de contacto está definido por los vectores X 1 e Y 1 . |
Las uniones giratorias pueden crearse sólo entre componentes que tienen movimiento relativo entre sí. Por tanto, debe haber al menos una unión estándar en el mecanismo que contenga los dos componentes de una unión giratoria. Las uniones giratorias aplican una restricción de contacto permanente. Las uniones giratorias pueden tener dos comportamientos distintos, según la opción que se elija durante la creación de la unión:
- La opción giratoria garantiza sólo la rotación acoplada de los engranajes.
- La opción giratoria y tangencial garantiza la tangencia entre los dos engranajes y la rotación acoplada de los engranajes.
Las uniones giratorias, cilindro sobre plano y cilindro en cilindro proporcionan acceso al parámetro Eficiencia. Los valores entre 0,001 y 1,0 representan la energía entre el engranaje de entrada y el de salida. Si la unión giratoria se crea automáticamente desde un generador de engranajes rectos de Design Accelerator, el parámetro Eficiencia se establece automáticamente y se bloquea su acceso. El parámetro Eficiencia se encuentra en la ficha Parámetros de las propiedades de la unión, en la sección Cargas.
Pasos preliminares
La construcción de estas uniones es similar a la de las uniones deslizantes.
- Abra un ensamblaje.
La sección Preparación de ensamblajes para simulación dinámica recoge sugerencias sobre cómo modelar un ensamblaje para facilitar la simulación .
- En la cinta de opciones, pulse
ficha Entornos
 panel Iniciar
Simulación dinámica
.
panel Iniciar
Simulación dinámica
. - En la cinta de opciones, pulse
ficha Simulación dinámica
panel Unión
Insertar Unión
 .
. - En el cuadro de diálogo Insertar unión, pulse la flecha abajo situada junto al cuadro de tipo de unión o pulse el icono Mostrar tabla de uniones
 para seleccionar el tipo de unión.
para seleccionar el tipo de unión.
El resto de pasos varían según el tipo de unión giratoria que se añada. Pulse los tipos de unión de abajo para ver los pasos a seguir para insertar una unión determinada.
Giro: cilindro sobre plano
En estas uniones, el segundo componente debe tener un movimiento plano relativo al primer componente.
- En el menú de tipo de unión o la tabla de uniones, seleccione Giro: cilindro sobre plano.
- En el cuadro de diálogo Insertar unión, pulse cualquier restricción: giratoria o dos restricciones, giratoria y tangente.
Inserte una unión giratoria de cilindro sobre plano de una restricción cuando el cilindro y el plano estén correctamente posicionados y la tangencia esté garantizada durante toda la simulación. El cilindro y el plano están correctamente colocados cuando el eje Z del cilindro es una distancia fija (el radio del cilindro) del plano.
Los criterios de verificación de tangencia son estrictos. Asegúrese de que los componentes sean geométricamente tangentes.
Inserte uniones giratorias de cilindro sobre plano de dos restricciones para forzar y mantener la tangencia entre el cilindro y el plano. La restricción de tangencia genera una carga normal.
El valor por defecto son dos restricciones: giratoria y tangente.
- En la ventana gráfica, especifique el plano del primer componente (el plano X-Z del sistema de coordenadas).
El sistema de coordenadas de uniones de un componente puede no ser igual al sistema de coordenadas de componentes.
El software expresa los resultados en el sistema de coordenadas de uniones del plano.
- Especifique el plano X-Y seleccionando el plano de contacto.Consejo: Si tiene problemas al seleccionar una entidad geométrica, pulse
 y, a continuación, seleccione el componente en la ventana gráfica. De esta forma resulta más fácil seleccionar una entidad en el componente.
y, a continuación, seleccione el componente en la ventana gráfica. De esta forma resulta más fácil seleccionar una entidad en el componente.Aunque no es necesario que siempre se seleccionen entidades geométricas adicionales para especificar el sistema de coordenadas de uniones, resulta muy conveniente detallar el sistema de coordenadas de uniones de la forma más precisa posible.
- Seleccione el origen del sistema de coordenadas de uniones.
El sistema de coordenadas de uniones del componente uno tiene su origen en el punto en el que el plano está asociado al cilindro.
- Si selecciona el plano como entidad uno, seleccione el eje Z para definir la normal al plano. Si selecciona el eje Z como entidad uno, seleccione el eje X para definir el plano.
- Especifique el plano X-Y seleccionando el plano de contacto.
- Especifique el sistema de coordenadas de uniones del cilindro.
- Seleccione el cilindro.
- Seleccione el origen del sistema de coordenadas de uniones.
- Si es necesario, en el cuadro de diálogo Insertar unión, pulse Cambiar X o Z para cambiar la dirección del eje X o el eje Z del sistema de coordenadas de uniones del primer componente.
- Pulse Aceptar.
Giro: cilindro en cilindro
En estas uniones, el segundo componente debe tener un movimiento plano relativo al primer componente.
- En el menú de tipo de unión o la tabla de uniones, seleccione Giro: cilindro en cilindro.
- En el cuadro de diálogo Insertar unión, pulse cualquier restricción: giratoria o dos restricciones, giratoria y tangente.
Inserte una unión giratoria de cilindro sobre cilindro de una restricción cuando los dos cilindros estén correctamente posicionados y la tangencia esté garantizada durante toda la simulación. Los dos cilindros estarán correctamente ubicados cuando los ejes Z de los dos cilindros estén a una distancia fija (la suma de los radios de los dos cilindros).
Los criterios de verificación de tangencia son estrictos. Asegúrese de que los componentes sean geométricamente tangentes.
Inserte dos uniones giratorias de cilindro sobre cilindro de dos restricciones para forzar y mantener la tangencia entre los dos cilindros. La restricción de tangencia genera una carga normal.
El valor por defecto son dos restricciones: giratoria y tangente.
- En la ventana gráfica, especifique el sistema de coordenadas de uniones del componente que contiene el cilindro uno.
El sistema de coordenadas de uniones de un componente puede no ser igual al sistema de coordenadas de componentes.
El software expresa los resultados en el sistema de coordenadas de uniones del primer componente.
- Seleccione el primer cilindro.Consejo: Si tiene problemas al seleccionar una entidad geométrica, pulse y, a continuación, seleccione el componente en la ventana gráfica. De esta forma resulta más fácil seleccionar una entidad en el componente.
Aunque no es necesario que siempre se seleccionen entidades geométricas adicionales para especificar el sistema de coordenadas de uniones, resulta muy conveniente detallar el sistema de coordenadas de uniones de la forma más precisa posible.
- Seleccione el origen del sistema de coordenadas de uniones.
El sistema de coordenadas de uniones del componente uno tiene su origen en el punto en el que el componente está asociado al segundo componente.
- Seleccione el eje X.
- Seleccione el primer cilindro.
- Realice el paso 3 para el componente que contiene el segundo cilindro.
- Si es necesario, en el cuadro de diálogo Insertar unión, pulse Cambiar X para cambiar la dirección del eje X de uno de los dos componentes.
- Pulse Aceptar.
Cuando se inserta una unión de una restricción y los cilindros no son tangentes, el software le avisa de que la distancia entre los dos ejes no es igual a la suma de los radios.
Cuando se inserta una unión de dos restricciones y los cilindros son tangentes, el software avisa de que el mecanismo tiene un grado de redundancia.
Giro: cilindro sobre cilindro
En estas uniones, el segundo componente debe tener un movimiento plano relativo al primer componente.
- En el menú de tipo de unión o la tabla de uniones, seleccione Giro: cilindro sobre cilindro.
- En el cuadro de diálogo Insertar unión, pulse cualquier restricción: giratoria o dos restricciones, giratoria y tangente.
Inserte uniones giratorias de cilindro en cilindro de una restricción cuando los dos cilindros estén correctamente posicionados y la tangencia esté garantizada durante toda la simulación. Los dos cilindros están correctamente ubicados cuando el eje Z del cilindro interno es una distancia fija (el radio del cilindro interno) de la superficie interna del cilindro externo.
Los criterios de verificación de tangencia son estrictos. Asegúrese de que los componentes sean geométricamente tangentes.
Inserte dos uniones giratorias de cilindro sobre cilindro de dos restricciones para forzar y mantener la tangencia entre los dos cilindros. La restricción de tangencia genera una carga normal.
El valor por defecto son dos restricciones: giratoria y tangente.
- En la ventana gráfica, especifique el sistema de coordenadas de uniones del componente que contiene el cilindro exterior.
El sistema de coordenadas de uniones de un componente puede no ser igual al sistema de coordenadas de componentes.
El software expresa los resultados en el sistema de coordenadas de uniones del primer componente.
- Seleccione el cilindro exterior.Consejo: Si tiene problemas al seleccionar una entidad geométrica, pulse y, a continuación, seleccione el componente en la ventana gráfica. De esta forma resulta más fácil seleccionar una entidad en el componente.
Aunque no es necesario que siempre se seleccionen entidades geométricas adicionales para especificar el sistema de coordenadas de uniones, resulta muy conveniente detallar el sistema de coordenadas de uniones de la forma más precisa posible.
- Seleccione el origen del sistema de coordenadas de uniones.
El sistema de coordenadas de uniones del primer componente tiene su origen en el punto en el que el componente está asociado al segundo componente.
- Seleccione el eje X.
- Seleccione el cilindro exterior.
- Realice el paso 3 para el componente que contiene el cilindro interior.
- Si es necesario, en el cuadro de diálogo Insertar unión, pulse Cambiar X para cambiar la dirección del eje X de uno de los dos componentes.
- Pulse Aceptar.
Cuando se inserta una unión de una restricción y los cilindros no son tangentes, el software le avisa de que la distancia entre los dos ejes no es igual a la suma de los radios.
Cuando se inserta una unión de dos restricciones y los cilindros son tangentes porque el resto de la cadena cinemática lo garantiza, el software avisa de que el mecanismo tiene un grado de redundancia.
Giro: curva de cilindro
En estas uniones, el segundo componente debe tener un movimiento plano relativo al primer componente.
- En el menú de tipo de unión o la tabla de uniones, seleccione Giro: curva de cilindro.
- En la ventana gráfica, especifique el sistema de coordenadas de uniones del componente que contiene la curva.
El sistema de coordenadas de uniones de un componente puede no ser igual al sistema de coordenadas de componentes.
El software expresa los resultados en el sistema de coordenadas de uniones del primer componente.
- Seleccione una cara curva, una arista o un contorno cerrado en un boceto.Consejo: Si tiene problemas al seleccionar una entidad geométrica, pulse y, a continuación, seleccione el componente en la ventana gráfica. De esta forma resulta más fácil seleccionar una entidad en el componente.
Aunque no es necesario que siempre se seleccionen entidades geométricas adicionales para especificar el sistema de coordenadas de uniones, resulta muy conveniente detallar el sistema de coordenadas de uniones de la forma más precisa posible.
- Seleccione la arista de la curva.
- Seleccione una cara curva, una arista o un contorno cerrado en un boceto.
- En la ventana gráfica, especifique el sistema de coordenadas de uniones del componente que contiene el cilindro.
- Seleccione el cilindro.
- Seleccione el origen del sistema de coordenadas de uniones.
- Pulse Aceptar.
Correa
En estas uniones, los ejes rotacionales de los dos componentes deben ser paralelos. Es decir, la unión funciona entre dos poleas que se encuentran en el mismo plano. La unión de correa sólo funciona si la distancia entre los centros de los dos cilindros es fija.
- En el menú de tipo de unión o la tabla de uniones, seleccione Correa.
- En el cuadro de diálogo Insertar unión, pulse Correa recta o Correa cruzada.
La opción por defecto es Correa recta.
- En la ventana gráfica, especifique el sistema de coordenadas de uniones del componente que contiene el cilindro uno.
El sistema de coordenadas de uniones de un componente puede no ser igual al sistema de coordenadas de componentes.
El software expresa los resultados en el sistema de coordenadas de uniones del primer componente.
- Seleccione el cilindro uno.
El eje del cilindro debe ser el eje Z del sistema de coordenadas de uniones.
Consejo: Si tiene problemas al seleccionar una entidad geométrica, pulse y, a continuación, seleccione el componente en la ventana gráfica. De esta forma resulta más fácil seleccionar una entidad en el componente.Aunque no es necesario que siempre se seleccionen entidades geométricas adicionales para especificar el sistema de coordenadas de uniones, resulta muy conveniente detallar el sistema de coordenadas de uniones de la forma más precisa posible.
- Seleccione el origen del sistema de coordenadas de uniones.
El sistema de coordenadas de uniones del primer componente tiene su origen en el punto en el que el componente está asociado al segundo componente.
- Seleccione el eje X.
- Seleccione el cilindro uno.
- Realice el paso 3 para el componente que contiene el cilindro dos.
- Si es necesario, en el cuadro de diálogo Insertar unión, pulse Cambiar X para cambiar la dirección del eje X.
- Pulse Aceptar.
Giro: cono sobre plano
En esta unión, el cono debe ser tangente al plano. Utilice otras uniones para mantener la tangencia durante la simulación.
- En el menú de tipo de unión o la tabla de uniones, seleccione Giro: cono sobre plano.
- En la ventana gráfica, seleccione el plano.Consejo: Si tiene problemas al seleccionar una entidad geométrica, pulse y, a continuación, seleccione el componente en la ventana gráfica. De esta forma resulta más fácil seleccionar una entidad en el componente.
El software expresa los resultados en el sistema de coordenadas de uniones del plano.
- Seleccione el cono.
El software inserta automáticamente los dos sistemas de coordenadas de uniones.
- Pulse Aceptar.
Giro: cono sobre cono
En esta unión, el segundo cono debe ser tangente al primer cono. Utilice otras uniones para mantener la tangencia durante la simulación.
- En el menú de tipo de unión o la tabla de uniones, seleccione Giro: cono sobre cono.
- En la ventana gráfica, seleccione el primer cono.
Si el componente seleccionado no contiene un cono, la Simulación dinámica genera uno cuya base y radio (R1) se convierte en las selecciones. El vértice se encuentra en la intersección de los ejes Y del sistema de coordenadas de los dos componentes.
El sistema de coordenadas de uniones de un componente puede no ser igual al sistema de coordenadas de componentes.
El software expresa los resultados en el sistema de coordenadas de uniones del primer componente.
- Seleccione el eje Y o bien un cono.Consejo: Si tiene problemas al seleccionar una entidad geométrica, pulse y, a continuación, seleccione el componente en la ventana gráfica. De esta forma resulta más fácil seleccionar una entidad en el componente.
Aunque no es necesario que siempre se seleccionen entidades geométricas adicionales para especificar el sistema de coordenadas de uniones, resulta muy conveniente detallar el sistema de coordenadas de uniones de la forma más precisa posible.
- Seleccione el origen del sistema de coordenadas de uniones.
- Seleccione el eje Y o bien un cono.
- Seleccione el eje Y del sistema de coordenadas de uniones del componente que contiene el segundo cono.
- Si es necesario, en el cuadro de diálogo Insertar unión, pulse Cambiar Y para cambiar la dirección del eje Y.
- Pulse Aceptar.
Giro: cono en cono
En esta unión, el cono interior debe ser tangente al cono exterior. Utilice otras uniones para mantener la tangencia durante la simulación.
- En el menú de tipo de unión o la tabla de uniones, seleccione Giro: cono en cono.
- En la ventana gráfica, especifique el sistema de coordenadas de uniones del componente que contiene el cono exterior.
Si el componente seleccionado no contiene un cono, la Simulación dinámica genera uno cuya base y radio (R1) se convierte en las selecciones. El vértice se encuentra en la intersección de los ejes Y del sistema de coordenadas de los componentes uno y dos.
El sistema de coordenadas de uniones de un componente puede no ser igual al sistema de coordenadas de componentes.
El software expresa los resultados en el sistema de coordenadas de uniones del primer componente.
- Seleccione el eje Y.Consejo: Si tiene problemas al seleccionar una entidad geométrica, pulse y, a continuación, seleccione el componente en la ventana gráfica. De esta forma resulta más fácil seleccionar una entidad en el componente.
Aunque no es necesario que siempre se seleccionen entidades geométricas adicionales para especificar el sistema de coordenadas de uniones, resulta muy conveniente detallar el sistema de coordenadas de uniones de la forma más precisa posible.
- Seleccione el origen del sistema de coordenadas de uniones.
- Seleccione el eje Y.
- Seleccione el eje Y del sistema de coordenadas de uniones para el cono interior.
- Si es necesario, en el cuadro de diálogo Insertar unión, pulse Cambiar Y para cambiar la dirección del eje Y.
- Pulse Aceptar.
Tornillo
Al igual que otras uniones giratorias, las uniones de tornillos funcionan entre componentes que ya tienen grados de libertad relativos entre ellos. La unión de tornillo acopla un grado de libertad de rotación y otro de traslación. Por defecto, durante la creación de una unión, el software crea una unión cilíndrica para proporcionar los dos grados de libertad entre los dos componentes antes de crear la unión de tornillo.
- En el menú de tipo de unión o la tabla de uniones, seleccione Tornillo.
- En el cuadro de diálogo Insertar unión, pulse Crear unión cilíndrica si desea que el software cree primero una unión cilíndrica entre los dos componentes.
Debe existir una unión cilíndrica entre los dos componentes antes de insertar una unión de tornillo.
- En la ventana gráfica, especifique el sistema de coordenadas de uniones del primer componente.
El sistema de coordenadas de uniones de un componente puede no ser igual al sistema de coordenadas de componentes.
El software expresa los resultados en el sistema de coordenadas de uniones del primer componente.
- Seleccione el eje Z, es decir, el eje de los grados de libertad de traslación y rotación.Consejo: Si tiene problemas al seleccionar una entidad geométrica, pulse y, a continuación, seleccione el componente en la ventana gráfica. De esta forma resulta más fácil seleccionar una entidad en el componente.
Aunque no es necesario que siempre se seleccionen entidades geométricas adicionales para especificar el sistema de coordenadas de uniones, resulta muy conveniente detallar el sistema de coordenadas de uniones de la forma más precisa posible.
- Seleccione el origen del sistema de coordenadas de uniones.
El sistema coordinado de unión para el primer componente se origina en el punto en que el componente se conecta con el segundo componente.
- Seleccione el eje X.
- Seleccione el eje Z, es decir, el eje de los grados de libertad de traslación y rotación.
- Realice el paso 3 para el segundo componente.
- Si es necesario, en el cuadro de diálogo Insertar unión, pulse Cambiar Z para cambiar la dirección del eje Z o Cambiar X para cambiar la dirección del eje X.
- Introduzca la separación del tornillo.
- Pulse Aceptar.
Engranaje helicoidal
Como otras uniones giratorias, el engranaje helicoidal funciona entre componentes que ya tienen grados relativos de libertad entre ellos. La unión de engranaje helicoidal acopla dos grados de libertad rotacionales que son perpendiculares entre ellos.
- En el menú de tipo de unión o la tabla de uniones, seleccione Engranaje helicoidal.
- En la ventana gráfica, especifique el sistema de coordenadas de uniones del componente que contiene el engranaje.
El sistema de coordenadas de uniones de un componente puede no ser igual al sistema de coordenadas de componentes.
El software expresa los resultados en el sistema de coordenadas de uniones del primer componente.
- Seleccione el eje Z.Consejo: Si tiene problemas al seleccionar una entidad geométrica, pulse y, a continuación, seleccione el componente en la ventana gráfica. De esta forma resulta más fácil seleccionar una entidad en el componente.
Aunque no es necesario que siempre se seleccionen entidades geométricas adicionales para especificar el sistema de coordenadas de uniones, resulta muy conveniente detallar el sistema de coordenadas de uniones de la forma más precisa posible.
- Seleccione el origen del sistema de coordenadas de uniones.
El sistema de coordenadas de uniones del primer componente tiene su origen en el punto en el que el engranaje está asociado al tornillo.
- Seleccione el eje X.
- Seleccione el eje Z.
- Especifique el sistema de coordenadas del componente que contiene el tornillo.
- Seleccione el eje Z.
- Seleccione el origen del sistema de coordenadas de uniones.
- Seleccione el eje X.
- Si es necesario, en el cuadro de diálogo Insertar unión, pulse Cambiar Z para cambiar la dirección del eje Z o Cambiar X para cambiar la dirección del eje X.
- Introduzca la separación del tornillo.
- Pulse Aceptar.
 Mostrar cómo se crea una unión de cilindro giratorio
Mostrar cómo se crea una unión de cilindro giratorio