Hasta este punto, el mecanismo no tiene pérdidas, es decir, funciona sin fricción ni amortiguamiento, a diferencia de lo que ocurriría en la práctica. Añadiremos fricción para capturar el entorno de funcionamiento.
Adición de fricción y finalización de la relación entre el yugo y la guía
- En el navegador, pulse con el botón derecho Blade set.iam y, a continuación, pulse Flexible. Al definir el ensamblaje como Flexible, se coloca en la carpeta de grupo soldado. En el ensamblaje, se evalúan las restricciones, y la restricción entre el yugo y la cuchilla provoca la adición de una unión de revolución.
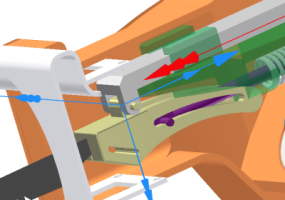
- Como se ha mencionado anteriormente, el ensamblaje todavía no tiene ninguna fricción. Este paso introduce fricción en la unión prismática. Pulse con el botón derecho en la unión prismática de la guía y el yugo escocés, y pulse Propiedades.
- Pulse la ficha grado de libertad 1 (T).
- Pulse el comando Editar fuerza de unión
 .
. - Pulse Activar fuerza de unión.
- Especifique un coeficiente de fricción seca de 0,1 y pulse Aceptar.
- Se debe añadir una restricción para definir la posición del yugo escocés con respecto al ensamblaje de manivela. Salga del entorno de simulación y pulse la ficha Ensamblaje.
- Defina la vista del navegador como Modelo y expanda el nodo Blade set.iam.
- Expanda el nodo de Scottish Yoke y pulse el comando Restringir.
- En el navegador, seleccione Plano de trabajo3 debajo del componente Scottish Yoke.
- En la región gráfica, seleccione una arista circular del componente Roller que forme parte del ensamblaje de la leva del cigüeñal. Se añade una unión Punto-Plano para reflejar la restricción.
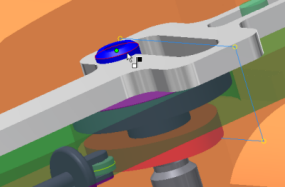
- Pulse Aceptar para añadir la restricción y cerrar el cuadro de diálogo.
- Vuelva a cambiar la vista del navegador a Simulación dinámica.
La unión Punto-Plano resultante tiene cinco grados de libertad y una restricción. Esta definición es suficiente para transferir el movimiento sin sobrerrestringir el modelo. La simulación dinámica detecta las condiciones sobrerrestringidas y ayuda al usuario a resolverlas.