Dopo aver creato un assieme e aver aggiunto uno o più giunti standard, è possibile inserire altri giunti (rotanti, scorrevoli, a contatto 2D e di forza) tra due componenti che presentano tra di loro uno o più gradi di libertà. È necessario inserire i giunti manualmente. A differenza dei giunti standard, non è possibile creare altri giunti automaticamente tramite la conversione dei vincoli . Tutti i giunti di queste categorie vincolano uno o più gradi di libertà creati dai giunti standard.
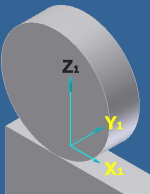 |
Alcuni giunti di rotolamento, ad esempio i giunti scorrevoli, possono chiudere linee cinematiche e, ad eccezione dei giunti conici, vengono utilizzati per i componenti con movimento 2D relativo tra loro. I sistemi di coordinate del giunto vengono posizionati in corrispondenza del punto di contatto. Il movimento del giunto si trova nel piano definito dai vettori Z 1 (perpendicolare) e X 1 (tangente). Il piano di contatto viene definito dai vettori X 1 e Y 1 . |
I giunti di rotolamento possono essere creati solo tra componenti in movimento relativo tra loro. È quindi necessaria la presenza di almeno un giunto standard nel meccanismo contenente i due componenti di un giunto di rotolamento. I giunti di rotolamento applicano un vincolo di contatto permanente. I giunti di rotolamento possono comportarsi in due modi diversi, in base all'opzione scelta durante la loro creazione:
- L'opzione rotante garantisce solo la rotazione in coppia degli ingranaggi.
- L'opzione rotante e tangente garantisce la tangenza tra i due ingranaggi e la loro rotazione in coppia.
I giunti di rotolamento, ovvero cilindro sul piano, cilindro sul cilindro e cilindro nel cilindro, forniscono l'accesso al parametro Efficienza. I valori compresi tra 0,001 e 1,0 rappresentano l'output di energia dall'ingranaggio di input a quello di output. Se il giunto di rotolamento viene automaticamente creato da un ingranaggio cilindrico di Design Accelerator, il parametro Efficienza verrà impostato automaticamente e l'accesso verrà disattivato. Il parametro Efficienza è incluso nella sezione Carichi della scheda Parametri di Proprietà giunto.
Passaggi preliminari
La costruzione di questi giunti è simile a quella dei giunti di scorrimento.
- Aprire un assieme.
Nei suggerimenti inclusi nella sezione Preparazione di assiemi per la simulazione dinamica viene descritto come modellare un assieme per semplificare la simulazione dinamica.
- Nella barra multifunzione fare clic sulla
scheda Ambienti
 gruppo Inizia
Simulazione dinamica
.
gruppo Inizia
Simulazione dinamica
. - Nella barra multifunzione fare clic sulla
scheda Simulazione dinamica
gruppo Giunto
Inserisci giunto
 .
. - Nella finestra di dialogo Inserisci giunto fare clic sulla freccia rivolta verso il basso nella casella Tipo di giunto oppure fare clic sull'icona Visualizza tabella giunti
 per selezionare il tipo di giunto.
per selezionare il tipo di giunto.
I passaggi rimanenti variano in base al tipo di giunto di rotolamento che si sta aggiungendo. Fare clic sul tipo di giunto desiderato fra quelli riportati di seguito per visualizzare i passaggi necessari per il suo inserimento.
Rotolamento: cilindro sul piano
Per questi giunti, il secondo componente deve presentare un movimento in piano rispetto al primo.
- Selezionare Rotolamento: cilindro sul piano nel menu Tipo di giunto o nella tabella Giunti.
- Nella finestra di dialogo Inserisci giunto fare clic su 1 vincolo: rotolamento oppure su 2 vincoli: rotolamento e tangente.
Inserire un cilindro con vincolo di rotolamento nei giunti piani quando il cilindro e il piano sono già posizionati correttamente e la tangenza è garantita durante l'intera simulazione. Il cilindro e il piano sono posizionati correttamente quando l'asse Z del cilindro è ad una distanza fissa (il raggio del cilindro) dal piano.
Il criterio di verifica della tangenza è rigido. Assicurarsi che i componenti siano geometricamente tangenti.
Inserire un cilindro con 2 vincoli di rotolamento nei giunti del piano per forzare e mantenere la tangenza tra il cilindro e il piano. Il vincolo tangente genera un carico perpendicolare.
Il valore di default è 2 vincoli: rotante e tangente.
- Nella finestra grafica specificare il piano sul primo componente (il piano X-Z del sistema di coordinate).
Il sistema di coordinate del giunto per un componente potrebbe non corrispondere al sistema di coordinate del componente.
Il software esprime i risultati nel sistema di coordinate del giunto del piano.
- Specificare il piano X-Y selezionando il piano di contatto.Suggerimento: In caso di problemi durante la selezione di un'entità geometrica, fare clic su
 e selezionare il componente nella finestra grafica. Questa funzione consente di semplificare la selezione di un'entità nel componente.
e selezionare il componente nella finestra grafica. Questa funzione consente di semplificare la selezione di un'entità nel componente.Benché non sia sempre necessario selezionare entità geometriche aggiuntive per specificare il sistema di coordinate del giunto, è consigliabile operare con la maggiore precisione possibile.
- Selezionare l'origine del sistema di coordinate del giunto.
Il sistema di coordinate del giunto per il componente 1 ha origine nel punto in cui il piano è collegato al cilindro.
- Se come prima entità si sceglie il piano, selezionare l'asse Z per definire la perpendicolare al piano. Se come prima entità si sceglie l'asse Z, selezionare l'asse X per definire il piano.
- Specificare il piano X-Y selezionando il piano di contatto.
- Specificare il sistema di coordinate del giunto del cilindro.
- Selezionare il cilindro.
- Selezionare l'origine del sistema di coordinate del giunto.
- Se necessario, nella finestra di dialogo Inserisci giunto, fare clic su Commuta X/Z per invertire la direzione dell'asse X o dell'asse Z del sistema di coordinate del giunto per il primo componente.
- Fare clic su OK.
Rotolamento: cilindro sul cilindro
Per questi giunti, il secondo componente deve presentare un movimento in piano rispetto al primo.
- Selezionare Rotolamento: cilindro sul cilindro nel menu Tipo di giunto o nella tabella Giunti.
- Nella finestra di dialogo Inserisci giunto fare clic su 1vincolo: rotante oppure su 2 vincoli: rotante e tangente.
Inserire un cilindro con vincolo di rotolamento nei giunti cilindrici quando i due cilindri sono già posizionati correttamente e la tangenza è garantita durante l'intera simulazione. I due cilindri sono posizionati correttamente quando gli assi Z dei due cilindri si trovano ad una distanza fissa tra loro (la somma dei raggi dei due cilindri).
Il criterio di verifica della tangenza è rigido. Assicurarsi che i componenti siano geometricamente tangenti.
Inserire un cilindro con 2 vincoli di rotolamento nei giunti cilindrici per forzare e mantenere la tangenza tra i due cilindri. Il vincolo tangente genera un carico normale.
Il valore di default è 2 vincoli: rotante e tangente.
- Nella finestra grafica, specificare il sistema di coordinate del giunto del componente che contiene il cilindro 1.
Il sistema di coordinate del giunto per un componente potrebbe non corrispondere al sistema di coordinate del componente.
Il software esprime i risultati nel sistema di coordinate del giunto del primo componente.
- Selezionare il primo cilindro.Suggerimento: In caso di problemi durante la selezione di un'entità geometrica, fare clic su e selezionare il componente nella finestra grafica. Questa funzione consente di semplificare la selezione di un'entità nel componente.
Benché non sia sempre necessario selezionare entità geometriche aggiuntive per specificare il sistema di coordinate del giunto, è consigliabile operare con la maggiore precisione possibile.
- Selezionare l'origine del sistema di coordinate del giunto.
Il sistema di coordinate del giunto per il componente 1 ha origine nel punto in cui quest'ultimo è collegato al secondo componente.
- Selezionare l'asse X.
- Selezionare il primo cilindro.
- Ripetere il passaggio 3 per il componente che contiene il secondo cilindro.
- Se necessario, nella finestra di dialogo Inserisci giunto, fare clic su Commuta X per invertire la direzione dell'asse X di uno dei componenti.
- Fare clic su OK.
Se si inserisce un giunto con vincolo e i cilindri non sono tangenti, viene visualizzato un messaggio in cui viene indicato che la distanza tra i due assi non è uguale alla somma dei raggi.
Se si inserisce un giunto con 2 vincoli e i cilindri sono tangenti, un messaggio avverte che il meccanismo presenta un grado di ridondanza.
Rotolamento: cilindro nel cilindro
Per questi giunti, il secondo componente deve presentare un movimento in piano rispetto al primo.
- Selezionare Rotolamento: cilindro nel cilindro nel menu Tipo di giunto o nella tabella Giunti.
- Nella finestra di dialogo Inserisci giunto fare clic su 1vincolo: rotante oppure su 2 vincoli: rotante e tangente.
Inserire un cilindro con 1 vincolo di rotolamento sui giunti cilindrici quando i due cilindri sono già posizionati correttamente e la tangenza è garantita durante l'intera simulazione. I due cilindri sono posizionati correttamente quando l'asse Z del cilindro interno si trova ad una distanza fissa (il raggio del cilindro interno) dalla superficie interna del cilindro esterno.
Il criterio di verifica della tangenza è rigido. Assicurarsi che i componenti siano geometricamente tangenti.
Inserire un cilindro con 2 vincoli di rotolamento nei giunti cilindrici per forzare e mantenere la tangenza tra i due cilindri. Il vincolo tangente genera un carico normale.
Il valore di default è 2 vincoli: rotante e tangente.
- Nella finestra grafica, specificare il sistema di coordinate del giunto del componente che contiene il cilindro esterno.
Il sistema di coordinate del giunto per un componente potrebbe non corrispondere al sistema di coordinate del componente.
Il software esprime i risultati nel sistema di coordinate del giunto del primo componente.
- Selezionare il cilindro esterno.Suggerimento: In caso di problemi durante la selezione di un'entità geometrica, fare clic su e selezionare il componente nella finestra grafica. Questa funzione consente di semplificare la selezione di un'entità nel componente.
Benché non sia sempre necessario selezionare entità geometriche aggiuntive per specificare il sistema di coordinate del giunto, è consigliabile operare con la maggiore precisione possibile.
- Selezionare l'origine del sistema di coordinate del giunto.
Il sistema di coordinate del giunto per il primo componente ha origine nel punto in cui quest'ultimo è collegato al secondo componente.
- Selezionare l'asse X.
- Selezionare il cilindro esterno.
- Ripetere il passaggio 3 per il componente che contiene il cilindro interno.
- Se necessario, nella finestra di dialogo Inserisci giunto, fare clic su Commuta X per invertire la direzione dell'asse X di uno dei componenti.
- Fare clic su OK.
Se si inserisce un giunto con 1 vincolo e i cilindri non sono tangenti, un messaggio avverte che la distanza tra i due assi non è uguale alla somma dei raggi.
Se si inserisce un giunto con 2 vincoli e i cilindri sono già tangenti perché il resto della catena cinematica lo garantisce, un messaggio avverte che il meccanismo presenta un grado di ridondanza.
Rotolamento: cilindro curva
Per questi giunti, il secondo componente deve presentare un movimento in piano rispetto al primo.
- Selezionare Rotolamento: cilindro curva nel menu Tipo di giunto o nella tabella Giunti.
- Nella finestra grafica, specificare il sistema di coordinate del giunto del componente che contiene la curva.
Il sistema di coordinate del giunto per un componente potrebbe non corrispondere al sistema di coordinate del componente.
Il software esprime i risultati nel sistema di coordinate del giunto del primo componente.
- Selezionare la faccia della curva, uno spigolo o una linea chiusa in uno schizzo.Suggerimento: In caso di problemi durante la selezione di un'entità geometrica, fare clic su e selezionare il componente nella finestra grafica. Questa funzione consente di semplificare la selezione di un'entità nel componente.
Benché non sia sempre necessario selezionare entità geometriche aggiuntive per specificare il sistema di coordinate del giunto, è consigliabile operare con la maggiore precisione possibile.
- Selezionare lo spigolo della curva.
- Selezionare la faccia della curva, uno spigolo o una linea chiusa in uno schizzo.
- Nella finestra grafica, specificare il sistema di coordinate del giunto del componente che contiene il cilindro.
- Selezionare il cilindro.
- Selezionare l'origine del sistema di coordinate del giunto.
- Fare clic su OK.
Cinghia
Per questi giunti, l'asse rotazionale dei due componenti deve essere parallelo, ovvero il giunto funziona tra due pulegge che si trovano sullo stesso piano. Il giunto a cinghia può funzionare solo se la distanza tra i centri dei due cilindri è fissa.
- Selezionare Cinghia nel menu Tipo giunto o nella tabella Giunti.
- Nella finestra di dialogo Inserisci giunto, fare clic su Cinghia dritta o Cinghia incrociata.
L'impostazione predefinita è Cinghia dritta.
- Nella finestra grafica, specificare il sistema di coordinate del giunto del componente che contiene il cilindro 1.
Il sistema di coordinate del giunto per un componente potrebbe non corrispondere al sistema di coordinate del componente.
Il software esprime i risultati nel sistema di coordinate del giunto del primo componente.
- Selezionare il cilindro 1.
L'asse del cilindro deve corrispondere all'asse Z del sistema di coordinate del giunto.
Suggerimento: In caso di problemi durante la selezione di un'entità geometrica, fare clic su e selezionare il componente nella finestra grafica. Questa funzione consente di semplificare la selezione di un'entità nel componente.Benché non sia sempre necessario selezionare entità geometriche aggiuntive per specificare il sistema di coordinate del giunto, è consigliabile operare con la maggiore precisione possibile.
- Selezionare l'origine del sistema di coordinate del giunto.
Il sistema di coordinate del giunto per il primo componente ha origine nel punto in cui quest'ultimo è collegato al secondo componente.
- Selezionare l'asse X.
- Selezionare il cilindro 1.
- Ripetere il passaggio 3 per il componente che contiene il cilindro 2.
- Se necessario, nella finestra di dialogo Inserisci giunto, fare clic su Commuta X per invertire la direzione di un asse X.
- Fare clic su OK.
Rotolamento: cono sul piano
Per questo giunto, il cono deve essere tangente al piano. Utilizzare altri giunti per mantenere la tangenza durante la simulazione.
- Selezionare Rotolamento: cono sul piano nel menu Tipo di giunto o nella tabella Giunti.
- Selezionare il piano nella finestra grafica.Suggerimento: In caso di problemi durante la selezione di un'entità geometrica, fare clic su e selezionare il componente nella finestra grafica. Questa funzione consente di semplificare la selezione di un'entità nel componente.
Il software esprime i risultati nel sistema di coordinate del giunto del piano.
- Selezionare il cono.
Il software posiziona automaticamente i due sistemi di coordinate del giunto.
- Fare clic su OK.
Rotolamento: cono sul cono
Per questi giunti, il secondo cono deve essere tangente al primo. Utilizzare altri giunti per mantenere la tangenza durante la simulazione.
- Selezionare Rotolamento: cono sul cono nel menu Tipo di giunto o nella tabella Giunti.
- Selezionare il primo cono nella finestra grafica.
Se il componente selezionato non contiene un cono, la Simulazione dinamica ne genera uno, per il quale è possibile selezionare la base e il raggio (R1). L'apice si trova all'intersezione degli assi Y dei sistemi di coordinate dei due componenti.
Il sistema di coordinate del giunto per un componente potrebbe non corrispondere al sistema di coordinate del componente.
Il software esprime i risultati nel sistema di coordinate del giunto del primo componente.
- Selezionare l'asse Y oppure un cono.Suggerimento: In caso di problemi durante la selezione di un'entità geometrica, fare clic su e selezionare il componente nella finestra grafica. Questa funzione consente di semplificare la selezione di un'entità nel componente.
Benché non sia sempre necessario selezionare entità geometriche aggiuntive per specificare il sistema di coordinate del giunto, è consigliabile operare con la maggiore precisione possibile.
- Selezionare l'origine del sistema di coordinate del giunto.
- Selezionare l'asse Y oppure un cono.
- Selezionare l'asse Y del sistema di coordinate del giunto del componente che contiene il secondo cono.
- Se necessario, nella finestra di dialogo Inserisci giunto, fare clic su Commuta Y per invertire la direzione di un asse Y.
- Fare clic su OK.
Rotolamento: cono nel cono
Per questi giunti, il cono interno deve essere tangente a quello esterno. Utilizzare altri giunti per mantenere la tangenza durante la simulazione.
- Selezionare Rotolamento: cono nel cono nel menu Tipo di giunto o nella tabella Giunti.
- Nella finestra grafica, specificare il sistema di coordinate del giunto del componente che contiene il cono esterno.
Se il componente selezionato non contiene un cono, la Simulazione dinamica ne genera uno, per il quale è possibile selezionare la base e il raggio (R1). L'apice si trova all'intersezione degli assi Y dei sistemi di coordinate dei componenti 1 e 2.
Il sistema di coordinate del giunto per un componente potrebbe non corrispondere al sistema di coordinate del componente.
Il software esprime i risultati nel sistema di coordinate del giunto del primo componente.
- Selezionare l'asse Y.Suggerimento: In caso di problemi durante la selezione di un'entità geometrica, fare clic su e selezionare il componente nella finestra grafica. Questa funzione consente di semplificare la selezione di un'entità nel componente.
Benché non sia sempre necessario selezionare entità geometriche aggiuntive per specificare il sistema di coordinate del giunto, è consigliabile operare con la maggiore precisione possibile.
- Selezionare l'origine del sistema di coordinate del giunto.
- Selezionare l'asse Y.
- Selezionare l'asse Y del sistema di coordinate del giunto per il cono interno.
- Se necessario, nella finestra di dialogo Inserisci giunto, fare clic su Commuta Y per invertire la direzione di un asse Y.
- Fare clic su OK.
Vite
Come tutti gli altri giunti di rotolamento, i giunti a vite funzionano tra componenti già separati da gradi di libertà. Il giunto a vite abbina un grado di libertà in rotazione e un grado di libertà in traslazione. Per impostazione predefinita, durante la creazione del giunto a vite, il software crea preventivamente un giunto cilindrico per fornire i due gradi di libertà tra i due componenti.
- Selezionare Vite nel menu Tipo giunto o nella tabella Giunti.
- Nella finestra di dialogo Inserisci giunto, fare clic su Crea giunto cilindrico, se si desidera che il software crei preventivamente un giunto cilindrico tra i due componenti.
Ci deve essere un giunto cilindrico tra due componenti, prima che sia possibile inserire un giunto a vite.
- Nella finestra grafica, specificare il sistema di coordinate del giunto del primo componente.
Il sistema di coordinate del giunto per un componente potrebbe non corrispondere al sistema di coordinate del componente.
Il software esprime i risultati nel sistema di coordinate del giunto del primo componente.
- Selezionare l'asse Z, ovvero l'asse dei gradi di libertà in traslazione e in rotazione.Suggerimento: In caso di problemi durante la selezione di un'entità geometrica, fare clic su e selezionare il componente nella finestra grafica. Questa azione consente di semplificare la selezione di un'entità nel componente.
Benché non sia sempre necessario selezionare entità geometriche aggiuntive per specificare il sistema di coordinate del giunto, è consigliabile operare con la maggiore precisione possibile.
- Selezionare l'origine del sistema di coordinate del giunto.
Il sistema di coordinate del giunto per il primo componente ha l'origine nel punto in cui questo componente è collegato al secondo componente.
- Selezionare l'asse X.
- Selezionare l'asse Z, ovvero l'asse dei gradi di libertà in traslazione e in rotazione.
- Ripetere il passaggio 3 per il secondo componente.
- Se necessario, nella finestra di dialogo Inserisci giunto, fare clic su Commuta Z o su Commuta X per invertire la direzione di un asse Z o di un asse X rispettivamente.
- Specificare il passo della vite.
- Fare clic su OK.
Ingranaggio a vite
Come tutti gli altri giunti di rotolamento, il giunto ingranaggio a vite funziona tra componenti che hanno già dei gradi di libertà relativi tra loro. Il giunto con ingranaggio a vite abbina due gradi di libertà in rotazione perpendicolari tra loro.
- Selezionare Ingranaggio a vite nel menu Tipo giunto o nella tabella Giunti.
- Nella finestra grafica, specificare il sistema di coordinate del giunto per il componente che contiene l'ingranaggio.
Il sistema di coordinate del giunto per un componente potrebbe non corrispondere al sistema di coordinate del componente.
Il software esprime i risultati nel sistema di coordinate del giunto del primo componente.
- Selezionare l'asse Z.Suggerimento: In caso di problemi durante la selezione di un'entità geometrica, fare clic su e selezionare il componente nella finestra grafica. Questa funzione consente di semplificare la selezione di un'entità nel componente.
Benché non sia sempre necessario selezionare entità geometriche aggiuntive per specificare il sistema di coordinate del giunto, è consigliabile operare con la maggiore precisione possibile.
- Selezionare l'origine del sistema di coordinate del giunto.
Il sistema di coordinate del giunto per il primo componente ha origine nel punto in cui l'ingranaggio è collegato alla vite.
- Selezionare l'asse X.
- Selezionare l'asse Z.
- Specificare il sistema di coordinate del giunto per il componente che contiene la vite.
- Selezionare l'asse Z.
- Selezionare l'origine del sistema di coordinate del giunto.
- Selezionare l'asse X.
- Se necessario, nella finestra di dialogo Inserisci giunto, fare clic su Commuta Z o su Commuta X per invertire la direzione di un asse Z o di un asse X rispettivamente.
- Specificare il passo della vite.
- Fare clic su OK.
 Procedura di creazione di un giunto cilindrico rotante
Procedura di creazione di un giunto cilindrico rotante