Fino a questo punto il meccanismo non presenta perdite il che significa una totale assenza di attrito o smorzamento normalmente presenti durante il funzionamento. L'aggiunta di attrito consentirà di definire l'ambiente operativo.
Aggiunta di attrito e completamento della relazione cinematismo-guida
- Nel browser, fare clic con il pulsante destro del mouse su Blade set.iam e scegliere Flessibile. L'impostazione Flessibile per l'assieme determina il posizionamento dell'assieme nella cartella del gruppo saldato. All'interno dell'assieme i vincoli vengono calcolati, e il vincolo tra il rinforzo e la lama determina l'aggiunta di un giunto Rivoluzione.
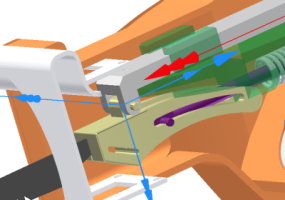
- Come accennato in precedenza, l'assieme è privo di attrito. Il passaggio seguente impone attrito al giunto prismatico. Fare clic con il pulsante destro del mouse sul giunto prismatico tra la guida e il rinforzo e fare clic su Proprietà.
- Fare clic sulla scheda gdl 1 (T).
- Fare clic sul comando Modifica forza giunto
 .
. - Fare clic su Attiva forza giunto.
- Immettere un coefficiente di Attrito a secco di 0,1 e scegliere OK.
- È necessario aggiungere un vincolo per posizionare il componente Scottish Yoke rispetto all'assieme della manovella. Chiudere l'ambiente di simulazione e fare clic sulla scheda Assieme.
- Impostare la vista del browser su Modello ed espandere il nodo Blade set.iam.
- Espandere il nodo Scottish Yoke e fare clic sul comando Vincolo.
- Nel browser selezionare Piano di lavoro3 nel componente Scottish Yoke.
- Nella finestra grafica selezionare uno spigolo circolare del componente Roller, appartenente all'assieme Cam crank. Viene inserito un giunto Punto-Piano per riflettere il vincolo.
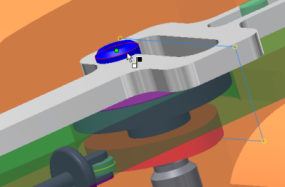
- Fare clic su OK per aggiungere il vincolo e chiudere la finestra di dialogo.
- Reimpostare la vista del browser su Simulazione dinamica.
Il giunto Punto-Piano risultante ha cinque gradi di libertà e un vincolo. Questo livello di definizione è sufficiente per trasferire il movimento senza ipervincolare il modello. In Simulazione dinamica è possibile rilevare e risolvere condizioni di ipervincolazione.