提供されているサンプル モデル(完成したスケルトン パーツ)を使用して、必要なフレーム パーツを派生させます。アセンブリを作成する前に、このパーツを確認してください。
- アクティブなプロジェクトを tutorial_files に設定します。
- SkeletonBase.ipt を開きます。
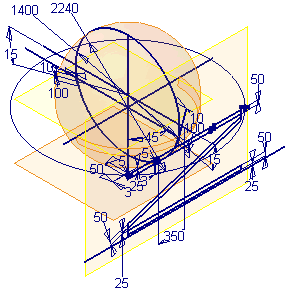
このパーツには、球状コンテナの支持フレームの基準ジオメトリを定義するスケッチ、作業フィーチャ、およびコンストラクション サーフェスが含まれています。スケルトン モデルは、フレームや他の加工アセンブリのようなスタティック モデルに適しています。最初のジオメトリがごちゃごちゃしていると分かりにくいことがあるため、パーツのスケッチとその他のジオメトリを個別に確認します。
- モデル ブラウザで、[パーツの終端]マーカーをドラッグし、[STRAP SURFACE]ノードの直下にドロップします。
- リボンで、
[表示]タブ
 [ナビゲート]パネル
[面を表示]
の順にクリックし、モデル ブラウザ内の[CIRC STRAP SKETCH]をクリックします。
[ナビゲート]パネル
[面を表示]
の順にクリックし、モデル ブラウザ内の[CIRC STRAP SKETCH]をクリックします。
1: ストラップ サーフェス プロファイル
2: ストラップ サーフェス
3: ストラップ ボディ プロファイル
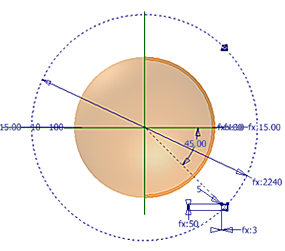
球状のコンストラクション サーフェスは、パーツのキー フィーチャです。球の直径によってこのスケルトンの他のジオメトリが決定され、それによってこのスケルトンから派生するパーツのサイズが決定されます。
共有ストラップ スケッチには、次の 2 つの関連プロファイルが含まれています。
- 球を取り囲むストラップを回転させる場合に使用するボディ プロファイル。
- ストラップ サーフェス フィーチャを作成する場合に使用するサーフェス プロファイル。このフィーチャは、ストラップと球を囲む外部フレームとの間の支持の終端サーフェスとして使用されます。詳細は、このチュートリアルで後ほど支持を作成する際に説明されます。
注: 2 つのスケッチ プロファイルは、パラメータ値によってリンクされています。 - モデル ブラウザで[パーツの終端]マーカーを[Work Plane - BOTT of Frame]ノードの下にドラッグして、3 つの作業平面の場所を確認します。
[STRAP SURFACE]の下の 3 つの作業平面によって、外部フレームの垂直寸法が定義されます。BOTT of Frame 作業平面は、フレームの垂直脚の終端面として使用されます。垂直脚のスケッチは、TOP of Frame 作業平面にあります。
- [パーツの終端]マーカーをモデル ブラウザの[VERTICAL LEGS SKETCH]ノードの下にドラッグします。[面を表示]コマンドを使用して、ビューの向きを次の図のように変更します。
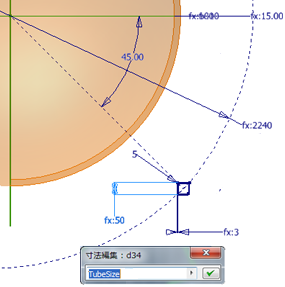
スケッチには、角チューブ脚のプロファイルが含まれています。2240 mm の寸法は、球の直径に関連付けられています。チューブのサイズと厚さは、ユーザ定義パラメータで制御されます。次の図は、TubeSize ユーザ パラメータで制御されるチューブのサイズを示しています。ユーザ定義パラメータはエクスポートされるため、スケルトン パーツから派生するすべてのパーツで参照することができます。
- [パーツの終端]マーカーをモデル ブラウザの一番下にドラッグします。残りのスケッチを確認します。投影されたジオメトリ、作業フィーチャ定義、またはパラメータによって、すべてのスケッチが関連付けられています。球の直径によって、フレームの重要な寸法すべてが決定されます。