チュートリアルの内容に進む前に、アセンブリ モデリングとダイナミック シミュレーション環境の違いを理解することをお勧めします。
ダイナミック シミュレーション環境とアセンブリ環境は、どちらも機構を作成する上で必要ですが、両者の間にはいくつかの重要な違いがあります。基本的な違いは、自由度に関する違いと、その管理方法です。
アセンブリ環境内では、拘束および固定されていないコンポーネントの自由度は 6 です。
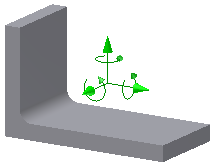
アセンブリ環境では、自由度を制限するために拘束を追加します。たとえば、パーツとそのいずれかの標準面との間にフラッシュ拘束を 1 つ追加すると自由度が 3 減少します。
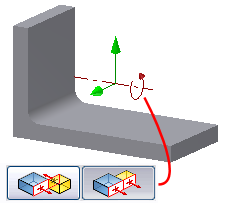
ダイナミック シミュレーションでは、拘束および固定されていないコンポーネントの自由度が 0 となり、シミュレーションでは動かなくなります。ジョイントの追加は、自由度を生み出します。ダイナミック シミュレーションを開始するとき、メイト 拘束を含んだコンポーネントは、このジョイントを自動的に受け取ります。
ダイナミック シミュレーション環境でもアセンブリ環境でも、目的は要求機能を満たす機構を構築することです。ダイナミック シミュレーションでは、そのような機構に、種々の荷重を持つ動的な現実世界の影響を追加して、現実に近い運動学的連鎖を作成します。