流体力による運動オブジェクトは、ユーザー指定による駆動/抵抗力と同様、流れによって影響されます。この力の原因を解析モデルに含める必要はありません。力は、ユーザーが定義した方法によって物体に作用し、主流方向に物体を移動させたり、あるいは流れと逆方向に作用します。
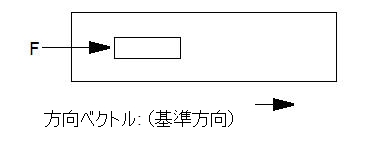
このセクションのいくつかの箇所では、物体の方向ベクトルについて説明します。これは、モーションタスクダイアログで指定された方向です。解析実行前には、真の流れによる運動の方向がわかっているわけではありません。従って、この方向は、実際には正方向の基準方向として使用されます。このため、駆動トルクと抵抗トルクはこの方向に対して相対的な値となります。
流体によって駆動される物体は、既知の速度から運動を開始し、周囲の流体の相互作用(あるいは設定された力)に基づいて加速、減速する可能性があります。
モーションエディタを開くには:
- モーションクイック編集ダイアログで、種類を直線に設定し、流れによる運動を選択します。
- モーションを編集の行で編集...をクリックします。
流体力による直線運動を定義するには
- 3つの物性値(初期速度、駆動力、抵抗力)を利用できますが、入力が必須というわけではありません。
- それぞれの希望するプロパティについて、 変化方法 を選択し、適切な値を入力します。変化方法は、それぞれの物性値に対して以下に説明します。
- 適用をクリックします。
- OKをクリックします。
変化方法
初期 速度
計算の最初に物体が運動している場合(あるいは完全停止からスタートしていない)、初期速度を定義しなければなりません。物体は、解析の開始からこの速度で運動を開始し、流体力に適切に反応します。
駆動力
駆動力は、運動を指定した方向(モーションタスクダイアログで指定した)に対する正方向の力です。負の駆動トルクは反対方向に作用する力となります。
駆動力の例として、電磁力、あるいは解析形状から除外された物体によって与えられた体積力(浮力)などがあります。これは、運動方向と同じ方向(モーションタスクダイアログで指定)の力として作用します。
重力が物体の運動方向に作用する場合、物体の重量を駆動力として指定することによって、駆動力を使用して物体に対する重力を表現できます。
駆動力の変化方法について、以下に説明します。
一定変化方法
解析の間、物体に作用する駆動力が変化しない場合、一定の値を入力します。
テーブルによる変化方法
駆動力が時間と共にに変化する場合、駆動力と時間のテーブルとして時系列データを入力します。すべてのテーブル入力と同様、この値はExcelの「.csv」ファイルから読み込み、または保存できます。
抵抗力
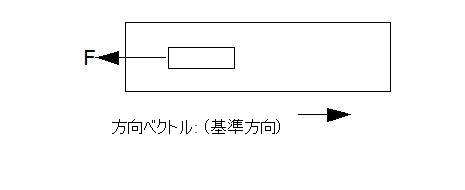
抵抗力を適用した場合、指定した運動方向に対して反対方向に作用する力、すなわち流れに対して進行方向の運動を妨げる力として物体の運動に影響を与えます。抵抗力の正の値は、運動方向と反対方向に作用し、負の値は運動方向と同じ方向に作用します。
一定および表形式の定義に加え、抵抗力には、ばねを定義することができます。これは、仮想的なばねであり、ジオメトリモデルには存在しません。
重力が物体の運動方向と逆方向に作用する場合、抵抗力として物体の重量を指定することにより、抵抗力を重力の指定に使用することができます。
抵抗力の変化方法について、以下に説明します。
一定
解析実行中、物体に作用する抵抗力が変化しない場合、一定の値を入力します。
テーブル
抵抗力が時間とともに変化する場合、抵抗力と時間のテーブルとして時系列データを入力します。すべてのテーブル入力と同様、この値はExcelの「.csv」ファイルから読み込み、または保存できます。
ばね
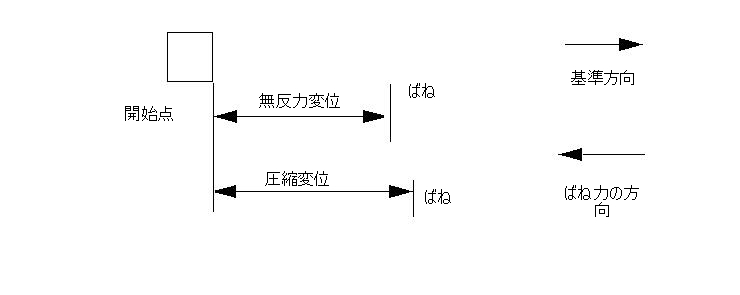
ばねを指定するためには、4つのパラメータを指定しなければならない。
- [無反力変位]: ばねに接触する前の移動距離です。
- [圧縮変位]: ばねが最も圧縮されるまでの(開始点を基準とする)移動距離です。これが移動の限界であり、衝突位置です。
- [初期反力]: 無反力変位におけるばねに作用する力です(これは、ばねの初期荷重です。初期トルクが無い場合、0を入力します)。
- [最大圧縮力]: 最大圧縮変位においてばねに作用する力です。
流体力による運動に対して指定した方向ベクトルが正方向の基準であることに注意してください。流れによって、真の物体の運動方向が異なる可能性があります。しかしながら、モーションタスクダイアログで指定した方向ベクトルが、適用される力と変位の符号に対して真の基準となります。
ばねは、典型的な抵抗力です。正方向のばね力は、物体運動の基準方向に対して反対方向の力となり、負の方向のばね力は、基準方向の力を与えます。
同様に、正の方向の変位が基準方向となり、負の方向の変位は基準方向と逆方向となります。
すべてのばねの変位は、モーションタスクダイアログの初期位置スライダーで指定した初期位置と相対的な値となることに注意してください。
以下の図に、ばねを有する複数の解析シナリオの設定方法を説明します。
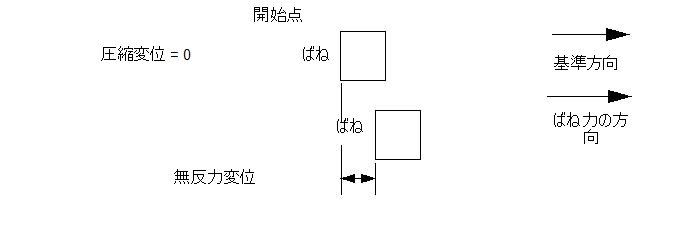
物体が時刻 = 0 で、ばねに接していない場合、構成は次のようになります。
物体が時刻=0で、ばねに接しており、無反力変位がゼロの場合、その配置は以下の通りです。
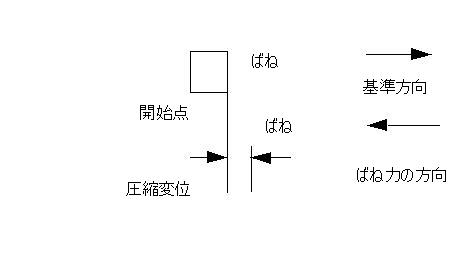
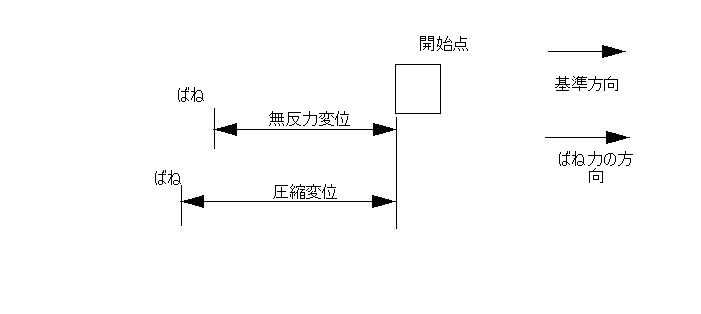
時刻=0において、ばねが物体によって完全に圧縮されている場合、最大圧縮変位がゼロであり、無反力変位はばねを圧縮できなくなる位置までの距離となります。
物体がばねと接触するために基準方向に対して反対方向に移動しなければならない場合、
変位は負の値として適用する必要があります。
移動部品に対して、1つのばねのみが許可されることに注意してください。従って、順方向、逆方向のばねを同じ部品に定義することはできません。
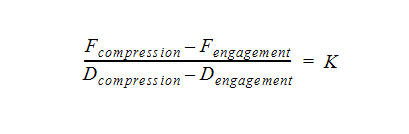
必要とされるパラメータとばね定数の関係は次式で与えられます。
関連トピック