Перед тем как продолжить выполнение заданий этого учебного пособия, полезно отметить различия между средой моделирования сборки и средой динамического моделирования.
Несмотря на то, что и динамическое моделирование, и среда работы со сборками используются для создания механизмов, существуют некоторые важные отличия между ними. Основное различие касается степеней свободы и порядка управления ими.
В среде сборки незакрепленные и не ограниченные зависимостями компоненты имеют шесть степеней свободы.
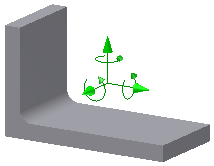
Можно добавить зависимости для ограничения числа степеней свободы. Например, добавление одной зависимости заподлицо между этой деталью и одной из ее канонических плоскостей приводит к удалению трех степеней свободы.
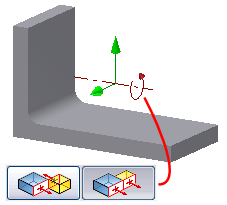
В среде динамического моделирования незакрепленные и ограниченные зависимостями компоненты имеют ноль степеней свободы и не перемещаются во время моделирования. Степени свободы создаются при добавлении соединений. При входе в среду динамического моделирования компоненты с зависимостями совмещения получают такие соединения автоматически.
С помощью динамического моделирования или среды сборки замысел превращается в функциональный механизм. С помощью динамического моделирования в этот функциональный механизм добавляются различного вида динамичные нагрузки, обусловленные воздействием реальных факторов, для создания настоящей кинематической цепочки.