变换属性(Transform Attributes)
请参见常规属性。
骨架信息(Skeleton Info)
- 起始关节(Start Joint)
-
显示起始关节 IK 控制柄的关节链的名称。您可以单击“>”图标按钮打开起始关节的“属性编辑器”(Attribute Editor)。
- 末端效应器(End Effector)
-
显示 IK 控制柄的末端效应器的名称。您可以单击“>”图标按钮打开末端效应器的“属性编辑器”(Attribute Editor)。
IK 控制柄属性(IK Handle Attributes)
- 捕捉启用(Snap Enable)
-
启用该属性时,当前 IK 控制柄将捕捉回其末关节的位置。默认为启用。
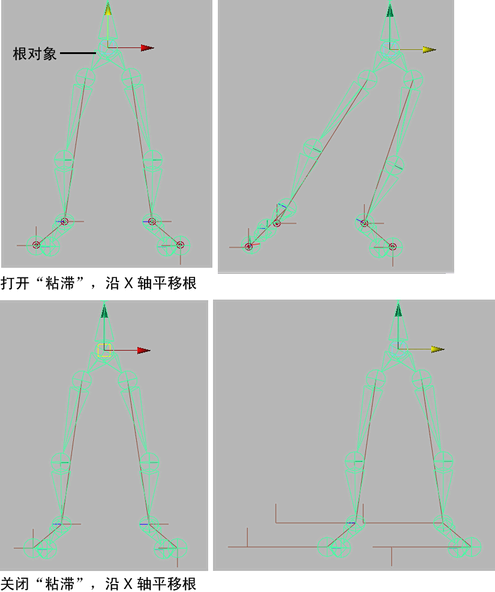
- 粘滞(Stickiness)
-
如果该属性处于启用状态且当前 IK 控制柄没有任何关键帧,当您使用其他 IK 控制柄或通过直接平移、旋转或缩放关节来调整关节姿势时,当前 IK 控制柄将粘滞到其当前位置。如果该属性处于启用状态且当前控制柄上具有关键帧,则忽略“粘滞”(Stickiness)。默认为“禁用”(off)。
当使用 IK 控制柄调整关节链的姿势以阻止不需要的关节链移动时,您可以使用“粘滞”(Stickiness)。例如,如果在移动和调整模型髋部的姿势时希望脚稳固站立在地板上,您可以为模型腿部的 IK 控制柄启用“粘滞”(Stickiness)。
- 优先级(Priority)
-
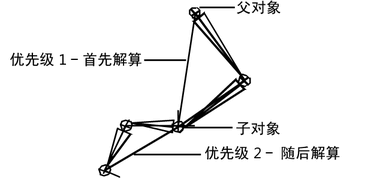
指定当前 IK 控制柄的优先级。“优先级”(Priority)仅在关节链具有多个 IK 控制柄时有用。“优先级”(Priority)旨在确保以正确的顺序解算关节链的 IK 控制柄,以便正确生成所需动画。
当您为关节链的 IK 控制柄设定“优先级”(Priority)时,Maya 根据每个控制柄在层次中的位置计算其优先级。“优先级”(Priority)为 1 的 IK 控制柄具有最高优先级并将首先旋转关节。“优先级”(Priority)为 2 的 IK 控制柄具有第二优先级并将随后旋转关节,依此类推。默认值为 1。
- 权重(Weight)
-
设定当前 IK 控制柄的权重值。
权重值,与 IK 控制柄的末端效应器及其目标之间的当前距离结合使用来排列以下项目的优先次序:当前 IK 链的解算、当前 IK 链的其他具有相同“优先级”(Priority)设置的 IK 控制柄的解算。请参见优先级。
当具有相同“优先级”(Priority)的两个或多个 IK 控制柄的末端效应器不能同时达到它们的目标时,首先解算末端效应器距离其目标最远并且权重最大的 IK 控制柄。
不适用于“单链解算器”(Single-Chain Solver)、“旋转平面解算器”(Rotate-Plane Solver)或“ik2Bsolver”控制柄。
- 位置方向权重(POWeight)
-
指定当前 IK 控制柄的末端效应器是否支持达到其目标的方向或位置。
如果将该属性设定为 1,则末端效应器将尝试达到 IK 控制柄的位置。如果将该属性设定为 0,则末端效应器仅尝试达到 IK 控制柄的方向。值为 0.5 指定末端效应器以同等程度尽可能达到位置和方向。默认值为 1.000。
不适用于“ik2Bsolver”或“旋转平面解算器”(Rotate-Plane Solver)控制柄。
IK 解算器属性(IK Solver Attributes)
- IK 混合(Ik Blend)
-
“IK 混合”(Ik Blend)值为 0.000 表示将动画模式设定为纯 FK,“IK 混合”(Ik Blend)值为 1.000 表示将动画模式设定为纯 IK。如果“IK 混合”(Ik Blend)值是介于 0.000 和 1.000 之间的数值,则当前骨架上的动画采用混合的 IK 和 FK。请参见 IK/FK 混合。
注:除了可以在多个帧上混合 IK 和 FK 动画之外,混合也可在单帧上发生。在单帧上混合会立即将 IK 切换为 FK 或将 FK 切换为 IK。
- IK FK 控制(Ik Fk Control)
-
使您可以操纵具有动画 IK 控制柄的关节链中的各关节,并设置其关键帧。“IK FK 控制”(Ik Fk Control)不但位于局部“IK 控制柄属性”(IK Handle Attributes)中,还位于全局骨架设置(“骨架 > 启用 IK/FK 控制”(Skeleton > Enable IK/FK Control))中。
注: “IK FK 控制”(Ik Fk Control)属性将禁用全局和局部“IK 控制柄捕捉”(IK Handle Snap)。 - IK 解算器(IK Solver)
-
为 IK 控制柄指定解算器的类型。请参见 IK 解算器。默认选项如下所示:
- 单链(Single-chain)
-
为 IK 单链控制柄选择“单链解算器”(Single-Chain Solver)。
- 旋转平面(Rotate-Plane)
-
为 IK 旋转平面控制柄选择“旋转平面解算器”(Rotate-Plane Solver)。
- 极向量(Pole Vector)
-
指定极向量的结束点的位置。
极向量仅适用于使用旋转平面解算器的 IK 控制柄(“IK 解算器”(IK Solver)设定为“旋转平面解算器”(Rotate-Plane Solver))。请参见旋转平面解算器。
- 扭曲(Twist)
-
不适用于单链 IK 控制柄。
按照指定的量从末关节扭曲关节链。