Die Fußplattform ist das IK-Ziel der Füße. Ihre Bewegung ist für die Animation der Beine von entscheidender Bedeutung.
-
CATMotion-Editor >
 Hierarchiegruppe > Hierarchie der Hubgruppe erweitern, der die Fußplattform angehört. > Auf den Controller klicken, den Sie bearbeiten möchten.
Hierarchiegruppe > Hierarchie der Hubgruppe erweitern, der die Fußplattform angehört. > Auf den Controller klicken, den Sie bearbeiten möchten.
RollenDrehpunktPos
Die Fußplattform eines CAT-Rigs verfügt über eine animierte Drehpunktposition, damit sichergestellt ist, dass sich der Fuß immer um den richtigen Punkt dreht. Der Controller "RollenDrehpunktPos" bestimmt die Position des Drehpunkts entlang der X-Achse der Fußplattform (der Querachse).
Ein Wert von 1,0 steht für die Außenseite des Fußes und ein Wert von 0,0 für die Innenseite der Fußplattform.
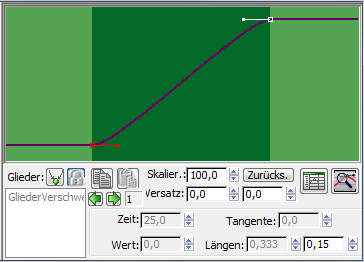
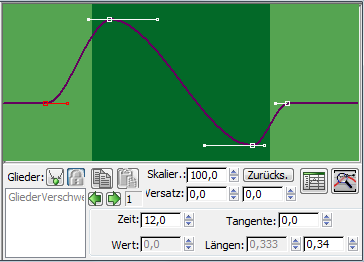
Rollen
Der Controller "Rollen" steuert die Drehung entlang der Längsachse der Fußplattform.
In der folgenden Abbildung beginnt das (Ab-) Rollen vor dem Abheben des Fußes vom Boden und endet nach dem Wiederaufsetzen. Dies ist ein typisches Szenario.
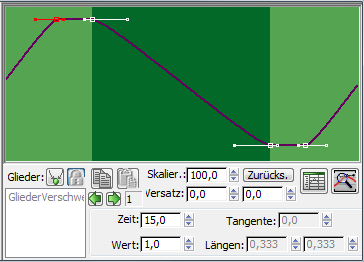
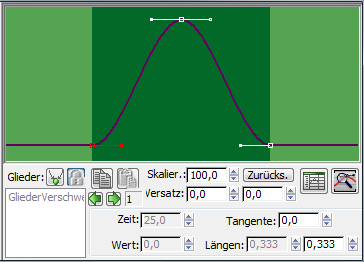
NeigenDrehpunktPos
Die Fußplattform verfügt über eine animierte Drehpunktposition, damit sichergestellt ist, dass sich der Fuß immer um den richtigen Punkt dreht. Der Controller "NeigenDrehpunktPos" steuert die Position des Drehpunkts entlang der Y-Achse der Fußplattform, d. h. entlang der Längsachse.
Bei einem Wert von 0,0 wird der Drehpunkt an der Ferse der Fußplattform positioniert und bei einem Wert von 1,0 an der Spitze.
Bei Menschen wird diese Einstellung typischerweise so animiert, dass der Drehpunkt zwischen Spitze (1,0) beim Abheben und Ferse (0,0) beim Aufsetzen wechselt, wie in der folgenden Abbildung gezeigt.
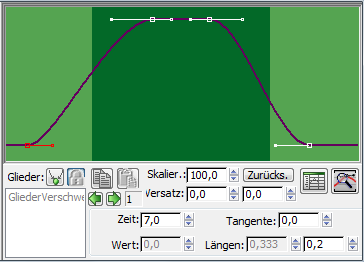
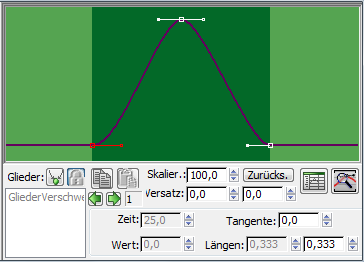
Neigung
Wie auch der Standard-Neigungs-Controller steuert der Neigungs-Controller der Fußplattform den Winkel der Längsachse (Y) der Fußplattform. Er wird zur Steuerung des Fußwinkels beim Abheben vom Boden und Wiederaufsetzen verwendet, wie in der folgenden Abbildung gezeigt.
FußDrücken
"FußDrücken" ist ein zyklischer Positionsversatz entlang der Y-Achse, mit dessen Hilfe Sie die Fußplattform während des Gehzyklus nach vorne werfen können.
Abschwenken
Die Controller "Abschwenken" ist mit dem Controller "Gewichtungsverschiebung" identisch. Er steuert den Positionszyklus der Fußplattform in Richtung der X-Achse (von Seite zu Seite).
SchrittForm
Der Controller "SchrittForm" steuert die Geschwindigkeit der Fußplattform in der Luft. Oder anders gesagt: Er steuert Beschleunigung und Verlangsamung der Fußplattform zwischen Abheben und Wiederaufsetzen.