![]()
-
Den Biped auswählen. >
 Bewegungsgruppe > Rollout Biped >
Bewegungsgruppe > Rollout Biped >  (Schrittmodus) > Rollout Schritterstellung >
(Schrittmodus) > Rollout Schritterstellung >  (Gehen) >
(Gehen) >  (Mehrere Schritte erstellen) > Dialogfeld Mehrere Schritte erstellen: Gehen
(Mehrere Schritte erstellen) > Dialogfeld Mehrere Schritte erstellen: Gehen
Dieses Dialogfeld wird angezeigt, wenn Sie im Rollout "Schritterstellung" in der Bewegungsgruppe die Gangart "Gehen" wählen und dann auf "Mehrere Schritte erstellen" klicken.
Prozeduren
So lassen Sie den Biped Treppen hinauf- oder herabgehen:
- Legen Sie im Bereich "Erster Schritt" für "Tatsächliche Schritthöhe" einen anderen Wert als 0 fest. Bei einem Wert über 0 geht der Biped nach oben und bei einem Wert unter 0 geht er nach unten.
So lassen Sie den Biped auf der Stelle treten:
- Legen Sie im Bereich "Erster Schritt" für "Parametrische Schrittlänge" den Wert Null fest.
So lassen Sie den Biped rückwärts gehen:
- Legen Sie im Bereich "Erster Schritt" für "Parametrische Schrittlänge" einen Wert unter Null fest.
Der absolute Wert der parametrischen Schrittlänge entspricht weiterhin der Länge des Schritts.
So lassen Sie den Biped beim Gehen beschleunigen:
- Klicken Sie im Bereich "Zeitablauf" auf "Interpolieren".
Die Steuerelemente im Bereich "Letzter Schritt" werden aktiviert.
- Legen Sie im Bereich "Letzter Schritt" für "Zeit bis zum nächsten Schritt" einen Wert fest, der niedriger ist als der für "Zeit bis zum nächsten Schritt" im Bereich "Erster Schritt".
Sie können die Werte in einem der Bereiche oder in beiden festlegen. Die für "Letzter Schritt" festgelegte Zeit muss in jedem Fall kürzer sein als die für "Erster Schritt".
Benutzeroberfläche
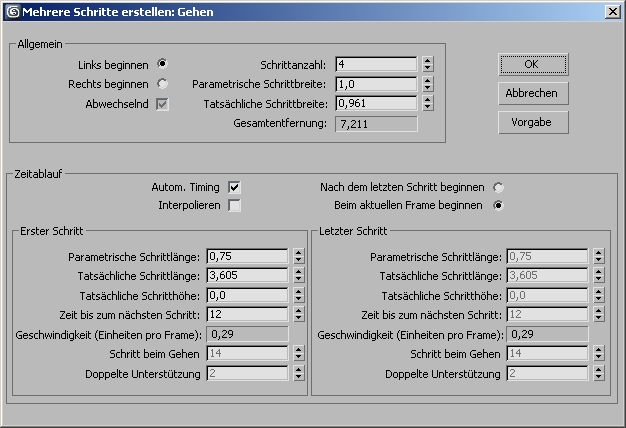
Bereich "Allgemein"
- Links beginnen Beginnt die Schrittfolge mit einem linken Schritt
- Rechts beginnen Beginnt die Schrittfolge mit einem rechten Schritt
- Abwechselnd
- Es wird zwischen linken und rechten Schritten abgewechselt. Wenn die Gangart "Gehen" ausgewählt ist, ist "Abwechselnd" immer aktiviert. Sie können "Abwechselnd" nur dann deaktivieren, wenn die Gangarten "Laufen" oder "Springen" ausgewählt sind.
- Schrittanzahl
- Legt fest, wie viele Schritte neu erstellt werden.
- Parametrische Schrittbreite
- Stellt die Schrittbreite als Prozentsatz der Beckenbreite ein. Bei einem Wert von 1,0 werden Schritte erzeugt, die genauso breit sind wie das Becken. Bei einem Wert von 3,0 wird ein ausladender, watschelnder Gang erzeugt. Werden an dieser Einstellung Änderungen vorgenommen, wird der Wert "Tatsächliche Schrittbreite" automatisch geändert.
"Parametrisch" beschreibt den Parameter hinsichtlich der Anatomie des Bipeds, und "Tatsächlich" beschreibt den Wert in 3ds Max-Einheiten.

Schrittbreite = 1 und Schrittbreite = 3
- Tatsächliche Schrittbreite
- Stellt die Schrittbreite in Modellierungseinheiten ein. Werden an dieser Einstellung Änderungen vorgenommen, wird der Wert "Parametrische Schrittlänge" automatisch geändert.
- Gesamtdistanz
- Zeigt die Gesamtdistanz an, die die Schritte mit den aktuellen Einstellungen zurücklegen. Dieser Wert kann nicht direkt geändert werden.
- OK
-
Erstellt Schritte mit den aktuellen Einstellungen.
- Abbrechen
-
Bricht die Schritterstellung ab.
- Vorgabe
-
Setzt die Werte im Dialogfeld auf die Vorgaben zurück.
Bereich "Zeitablauf"
- Autom. Timing
- Stellt die Zeitablaufparameter automatisch ein. Die Option "Autom. Timing" wirkt sich bei der Gangart "Gehen" auf folgende Zeitablaufparameter aus:
- Schritt beim Gehen, Doppelte Unterstützung
Ist "Autom. Timing" aktiviert, werden diese Parameter automatisch auf passende Werte eingestellt. Sie steuern die Schrittfolge, indem Sie die Parameter "Schrittlänge" und "Zeit bis zum nächsten Schritt" ändern.
Wenn die Option "Autom. Timing" deaktiviert ist, können Sie die Schrittfolge steuern, indem Sie die Zeitablaufparameter der Gangart ändern, den Parameter "Zeit bis zum nächsten Schritt" können Sie jedoch nicht ändern.
- Schritt beim Gehen, Doppelte Unterstützung
- Interpolieren
- Ermöglicht das Beschleunigen oder Verlangsamen einer Schrittfolge. Ist dieses Kontrollkästchen aktiviert, ist ein zweiter Satz von Schrittparametern unter "Letzter Schritt" aktiviert.
In Biped werden Schritte beginnend mit den Parameterwerten unter "Erster Schritt" und endend mit den Parameterwerten unter "Letzter Schritt" erstellt.
Durch die Interpolation zwischen den beiden Werten wird in Biped eine Schrittfolge erzeugt, die sich über einen Zeitraum hinweg ändert.
Ist "Interpolieren" deaktiviert, werden die Parameter im Bereich "Letzter Schritt" abgeblendet. In Biped werden nun alle Schritte nur mit den Parametern unter "Erster Schritt" erstellt.
- Nach dem letzten Schritt beginnen Hängt die neu erstellten Schritte an die bestehende Schrittfolge an.
- Beim aktuellen Frame beginnen Fügt die neu erstellten Schritte am aktuellen Frame nach der vorhandenen Schrittfolge ein. Dadurch kann eine Pause eingefügt werden, bevor die Schritte wieder aufgenommen werden.
Bereiche "Erster Schritt" und "Letzter Schritt"
- Parametrische Schrittlänge
- Legt die Schrittlänge für die neuen Schritte als Prozentsatz der Beinlänge des Bipeds fest. Bei Verwendung des vorgegebenen Werts von 0,75 wird eine durchschnittliche Schrittlänge mit normalen Proportionen erzeugt.
Bei einem Wert von 1,0 wird eine Schrittlänge erzeugt, die der Beinlänge entspricht. Dabei muss sich der Biped zum Erreichen des nächsten Schritts etwas strecken. Bei einem Wert von 0,0 geht der Biped auf der Stelle. Bei einer negativen Schrittlänge geht der Biped rückwärts.
Geht ein Biped rückwärts, wird dabei nicht einfach die Vorwärtsbewegung umgekehrt, sondern der Fuß setzt auch korrekt zuerst mit dem Zeh und dann mit der Ferse auf dem Boden auf.
Beim Anpassen von "Parametrische Schrittlänge" wird der Wert für "Tatsächliche Schrittlänge" automatisch geändert.

Schrittlänge = 0,75 und Schrittlänge = 1
- Tatsächliche Schrittlänge
- Legt die Schrittlänge für die neuen Schritte in 3ds Max-Einheiten fest.
Es gelten die gleichen Regeln wie für "Parametrische Schrittlänge" (siehe oben).
Beim Anpassen von "Tatsächliche Schrittlänge" wird der Wert für "Parametrische Schrittlänge" automatisch geändert.
- Tatsächliche Schritthöhe
- Legt den positiven oder negativen Höhenunterschied zwischen den Schritten fest. Mit diesem Parameter können Sie Schritte erzeugen, die einen Hang oder eine Treppe hinauf- oder hinabgehen.
Der Wert für "Tatsächliche Schritthöhe" ist der Höhenunterschied zwischen jeweils zwei neuen Schritten, ausgedrückt in Einheiten. Bei positiven Werten geht der Biped hinauf und bei negativen Werten hinunter.

Schritthöhe = 5 Einheiten
- Zeit bis zum nächsten Schritt
- Legt die Anzahl der Frames in jedem Fußbewegungszyklus fest. Ein Zyklus beginnt mit dem Frame, bei dem ein Fuß den Boden berührt, fährt mit dem Abheben und Fortbewegen des Fußes fort, und endet bei dem Frame, bei dem der Fuß wieder auf dem Boden aufkommt. Dieser Parameter ist nur dann verfügbar, wenn "Autom. Timing" aktiviert ist.
- Geschwindigkeit
- Zeigt die Anzahl der Einheiten an, über die sich der Biped in jedem Frame fortbewegt. Dieser Parameter wird an Änderungen angepasst, die an anderen Parametern vorgenommenen werden. Er kann jedoch nicht direkt eingestellt werden.
Die folgenden beiden Parameter sind nur dann verfügbar, wenn "Autom. Timing" deaktiviert ist.
Sie können diese Parameter anstelle von "Autom. Timing" verwenden, um die Geschwindigkeit der Vorwärtsbewegung in einer Schrittfolge zu steuern. Da diese Parameter sich jedoch auf die Bodenberührungsdauer des Schritts auswirken, wird bei der Verwendung dieser Parameter zum Verlangsamen des Gangs ein zögerlicher Stop-and-go-Effekt erzielt.
- Schritt beim Gehen
- Legt die Anzahl der Frames fest, bei denen sich jeder Schritt während des Gehens auf dem Boden befindet.
Je höher die Zahl, desto länger berührt der Fuß den Boden und desto langsamer ist folglich die Gehbewegung.
Die Schritte 3 bis 5 berühren jeweils über 22 Frames hinweg den Boden.
- Doppelte Unterstützung
- Legt die Anzahl der Frames fest, bei denen sich beide Füße beim Gehen gleichzeitig auf dem Boden befinden.
Je höher die Zahl, desto länger berühren beide Füße bei einem Gehzyklus den Boden und desto langsamer ist folglich die Gehbewegung.

Die gestrichelte Linie umgibt die Zeit, in der beide Füße den Boden berühren ("Doppelte Unterstützung", 6 Frames)