Here are the additional controls for the HI IK solver. The IK Solver Plane is controlled here through the Swivel Angle, which can be animated directly or using a target object.
-
Select end effector of an HI IK chain. >
 Motion panel > Parameters button > IK Solver Properties rollout
Motion panel > Parameters button > IK Solver Properties rollout
In the Parent Space group you can choose to whether the IK goal or the start joint will be used as the parent space for the swivel angle. If IK Goal is selected (which is the default), then the Swivel Angle of the chain is defined in the parent space of its goal. If Start Joint is chosen, then the Swivel Angle will be relative to the parent space of the start joint. These two options allow a much better control of the swivel angle on a chain with two HI IK solvers. For example, the first solver on the upper part of a chain can use a Swivel Angle in the Parent Space of the Start Joint, while the second IK solver on the lower part of the chain uses the Parent Space of the IK Goal. In this case, the change of the Swivel Angle for one chain won’t change the orientation of the other one.
In the Thresholds and Solutions group you can refine the IK solution. The Position Threshold sets a limit in units of how far the goal can be moved from the end effector, the Rotation does the same in angle degrees.
The Solutions group Iterations is the maximum number of attempts the IK solution will perform before giving up.
If your IK animation seems to jitter, try increasing the Iterations to 200. Increasing the Iterations will slow down the computational time, but should produce better results.
Manipulator for the Swivel Angle
![]() You can adjust the swivel angle with the spinner in this rollout, or you can adjust it with a manipulator. To do so, turn on Select and Manipulate. The swivel angle manipulator is displayed as a handle in the viewports.
You can adjust the swivel angle with the spinner in this rollout, or you can adjust it with a manipulator. To do so, turn on Select and Manipulate. The swivel angle manipulator is displayed as a handle in the viewports.
Swivel angle manipulator.
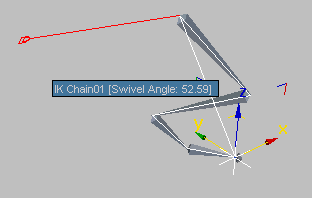
Swivel angle manipulator.
When you move the mouse over the manipulator, it turns red. At this point, you can drag the manipulator to change the swivel angle. The Auto Key button can be active while you do this.
You can also animate the swivel angle by using a target object. Pick an object for the target, then animating the object will animate the swivel angle.
The swivel angle manipulator is a standard plane angle manipulator. The HI Solver has its own controls for displaying this manipulator. These are on the IK Display Options rollout.
Procedures
To increase the precision of an IK solution:
-
 Select the goal in an HI IK chain.
Select the goal in an HI IK chain. - In the IK Solver Properties rollout increase the Iterations to 200 in the solutions group.
-
 Play or
Play or  render the animation.
render the animation. - You can also adjust the Position and Rotation Thresholds to a smaller value.
Interface
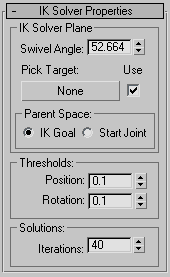
IK Solver Plane group
- Swivel Angle
- Controls the Solver Plane, which determines the direction of the knee or elbow in a human limb. The Swivel Angle can be manipulated in the viewport by turning on Swivel Angle Display in the Display Options rollout, and then turning on Manipulate Mode. When the swivel angle manipulator is displayed in the viewport, you can interactively animate the handle to animate the solver plane.
- Pick Target
- Lets you select another object to use to animate the Swivel Angle.
- Use
- Turns the use of the Target on and off.
- Parent Space
- Defines what space the Swivel Angle is relative to. Use this on chains with multiple solvers, so the swivel angle manipulations on one chain will not affect the second. For more information, see White Paper: Swivel Angle of the HI IK Solver.
- IK Goal Defines the Swivel Angle parent space relative to the IK Goal.
- Start Joint Defines the Swivel Angle Parent Space relative to the Start Joint.
Thresholds group
Use to define the tolerances the system uses for its calculations.
- Position
-
Sets a limit in units of how far the goal can be moved from the end effector. Keep these numbers low.
- Rotation
-
Sets a limit in degrees of how far the goal can be rotated away from the end effector rotation. Keep these numbers low for best results.
Note that adjusting the Rotation threshold on the HI Solver and IK Limb Solver has no effect. It is up to the plug-in solver’s discretion as to whether or not they will support a rotation component in the IK solution.
Solutions group
Use to control the precision of the animation. Increase the iterations when the IK solution produces an animation that appears rough or jittered.
- Iterations
- The number of attempts an IK solution will make to find the best match between the goal and the end effector positions. Increase this number if you are seeing jumpy animation.