Parent->Child precedence causes joints closest to where a force is applied (the end effector) to move less than joints farther away from the force. This is the opposite of Child->Parent precedence. Parent->Child precedence assigns the highest precedence to the base object and the lowest precedence to the end effector.
You might use this type of precedence for a number of special cases. For example:
- When joints near the end effector are less flexible than joints near the base. You use Parent->Child precedence in conjunction with limits and damping. For more information about the latter two, see Setting Joint Resistance and Spring Back.
- When animating a kinematic chain where the real-world object is moved by applying force to the base of the chain. Imagine an animal's tail. Using IK you animate the tail by moving the tip of the tail. However, a real animal moves its tail using muscles at the tail's base. The real-world motion is applied from the base to the tip in a Parent->Child order.
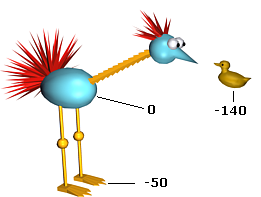
The figure shows values for parent-to-child precedence.
The figure shows values for parent-to-child precedence.
Assigning Parent->Child Precedence
Clicking Parent->Child sets joint precedence based on a child having a lower precedence than its parent. The values are calculated by setting the root of the entire hierarchy to a precedence of 0 and each child to a value equal to –10 times its depth from the root.
You almost always assign Parent->Child precedence to an entire kinematic chain. The chain for the structure in the above figure uses the body as the root object and the duck as the end effector. Using Parent->Child precedence, the feet are assigned a precedence of –50 and the duck is assigned a precedence of –140.
You might want to assign Parent->Child precedence to a single object in the kinematic chain. The value assigned to the object is equal to its depth from the root of the hierarchy times –10.