トランスフォーム(Transform)アトリビュート
詳細については、「一般属性」を参照してください。
スケルトン情報(Skeleton Info)
- 開始ジョイント(Start Joint)
-
開始ジョイント IK ハンドルの名前を表示します。「>」アイコン ボタンをクリックして、開始ジョイント用のアトリビュート エディタ(Attribute Editor)を開くことができます。
- エンド エフェクタ(End Effector)
-
IK ハンドルのエンド エフェクタの名前を表示します。「>」アイコン ボタンをクリックして、エンド エフェクタ用のアトリビュート エディタ(Attribute Editor)を開くことができます。
IK ハンドル アトリビュート(IK Handle Attributes)
- スナップの有効化(Snap Enable)
-
このアトリビュートをオンに設定すると、現在の IK ハンドルがその終了ジョイントの位置にスナップされます。既定はオンです。
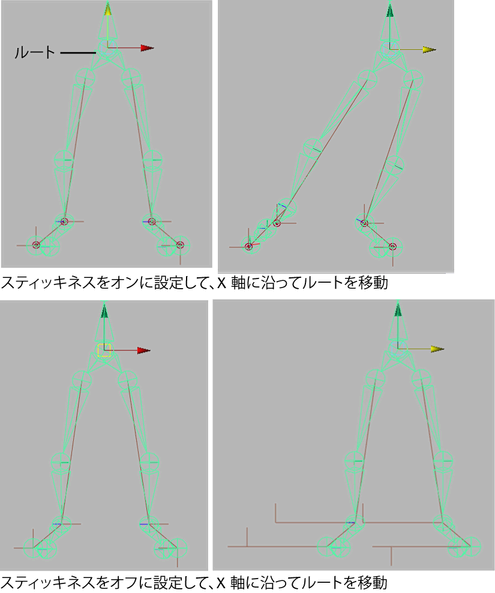
- スティッキネス(Stickiness)
-
このアトリビュートをスティッキー(sticky)に設定し、現在の IK ハンドルにキーフレームが存在しない場合、別の IK ハンドルを使用するか、または直接ジョイントを移動、回転、スケールしてスケルトンにポーズを設定する際に、現在の IK ハンドルは現在の位置を保持します。このアトリビュートをオンに設定し、現在のハンドルにキーフレームが存在する場合、スティッキネス(Stickiness)は無視されます。既定はオフ(off)です。
IK ハンドルによってジョイント チェーンのポーズを設定する際にスティッキネス(Stickiness)を使用すると、不要なジョイント チェーンの動きを防ぐことができます。 たとえば、モデルのヒップを移動して、ポーズを設定するときに足を床にしっかりと固定して置きたい場合は、モデルの脚の IK ハンドルに対してスティッキネス(Stickiness)をオンに設定することができます。
- 優先順位(Priority)
-
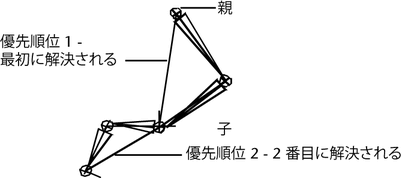
現在の IK ハンドルの優先順位を指定します。優先順位(Priority)は、ジョイント チェーンに複数の IK ハンドルがある場合に便利です。優先順位(Priority)の目的は、希望するアニメーションを適切に作成できるように、ジョイント チェーンの IK ハンドルが正しい順序で解決を行えるようにすることにあります。
ジョイント チェーンの IK ハンドルに優先順位を設定する場合、Maya は階層内の位置に基づいて各ハンドルの優先順位(Priority)を計算します。優先順位(Priority) 1 の IK ハンドルが最優先され、そのジョイントを最初に回転します。優先順位(Priority) 2 の IK ハンドルが次に優先され、そのジョイントを次に回転します。それ以降も、同様です。既定は 1 です。
- ウェイト(Weight)
-
現在の IK ハンドルのウェイト値を設定します。
ウェイト値は、IK ハンドルのエンド エフェクタとそのゴールの間の現在の距離と連動して、現在の IK チェーンの解決方法および同じ優先順位(Priority)設定の他の IK ハンドルの優先順位を設定します。詳細については、優先順位(Priority)を参照してください。
同じ優先順位(Priority)を持つ IK ハンドルの複数のエンド エフェクタが同時にそのゴールに到達できない場合は、エンド エフェクタがゴールから最も遠く、ウェイトが最も大きい IK ハンドルが最初に解決されます。
シングル チェーン ソルバ(Single-Chain Solver)、回転プレーン ソルバ(Rotate-Plane Solver)、または ik2Bsolver ハンドルでは無効です。
- 位置/方向ウェイト(POWeight)
-
ゴールの位置と方向に、現在の IK ハンドルのエンド エフェクタを優先して到達させるかどうかを指定します。
このアトリビュートを 1 に設定すると、エンド エフェクタは IK ハンドルの位置に到達しようとします。このアトリビュートを 0 に設定すると、エンド エフェクタは IK ハンドルの方向に到達しようとします。この値が 0.5 の場合、エンド エフェクタは位置と方向の両方に可能な限り到達しようとします。既定は 1.000です。
ik2Bsolver ハンドルまたは回転プレーン ソルバ(Rotate-Plane Solver)ハンドルでは無効です。
IK ソルバ アトリビュート(IK Solver Attributes)
- IK ブレンド(Ik Blend)
-
アニメーション モードは、IK ブレンド(Ik Blend)値が 0.000 のときは純粋な FK に設定され、1.000 のときは純粋な IK に設定されます。IK ブレンド(Ik Blend)値が 0.000 ~ 1.000 の間に設定されたときは、現在のスケルトンのアニメーションは IK と FK のブレンドになります。詳細については、IK/FK ブレンディングを参照してください。
注:IK および FK アニメーションは複数のフレーム上でブレンドできるだけではなく、単一フレーム上でもブレンドできます。単一フレーム上でのブレンドによって、IK から FK、または FK から IK に即座に切り替えることができます。
- IK/FK コントロール(Ik Fk Control)
-
IK/FK コントロールを使用すると、アニメートされた IK ハンドルがあるジョイント チェーンのジョイントを操作したり、キー設定したりすることができます。IK/FK コントロール(Ik Fk Control)は、ローカルの IK ハンドル アトリビュート(IK Handle Attributes)にありますが、グローバルのスケルトン設定(スケルトン > IK/FK コントロールの有効化(Skeleton > Enable IK/FK Control))でも表示されます。
注: IK/FK コントロール(Ik Fk Control)アトリビュートを有効にすると、グローバルおよびローカルの IK ハンドルのスナップ(IK Handle Snap)はオフになります。 - IK ソルバ(IK Solver)
-
IK ハンドルのソルバのタイプを指定します。詳細については、IK ソルバを参照してください。既定のオプションは次のとおりです。
- シングル チェーン
-
IK シングル チェーン ハンドルの シングル チェーン ソルバ(Single-Chain Solver)を選択します。
- 回転プレーン
-
IK 回転プレーン ハンドルの回転プレーン ソルバ(Rotate-Plane Solver)を選択します。
- 極ベクトル(Pole Vector)
-
極ベクトルのエンド ポイントの位置を指定します。
極ベクトルは、回転プレーン ソルバを使用する(IK ソルバ(IK Solver)が回転プレーン ソルバ(Rotate-Plane Solver)に設定されている) IK ハンドルにのみ適用できます。詳細については、回転プレーン ソルバを参照してください。
- ツイスト(Twist)
-
シングル チェーン IK ハンドルでは無効です。
ジョイント チェーンを指定した量で終了ジョイントからツイストします。