Mechanical Simulation Job Manager には、次の要素が含まれています。
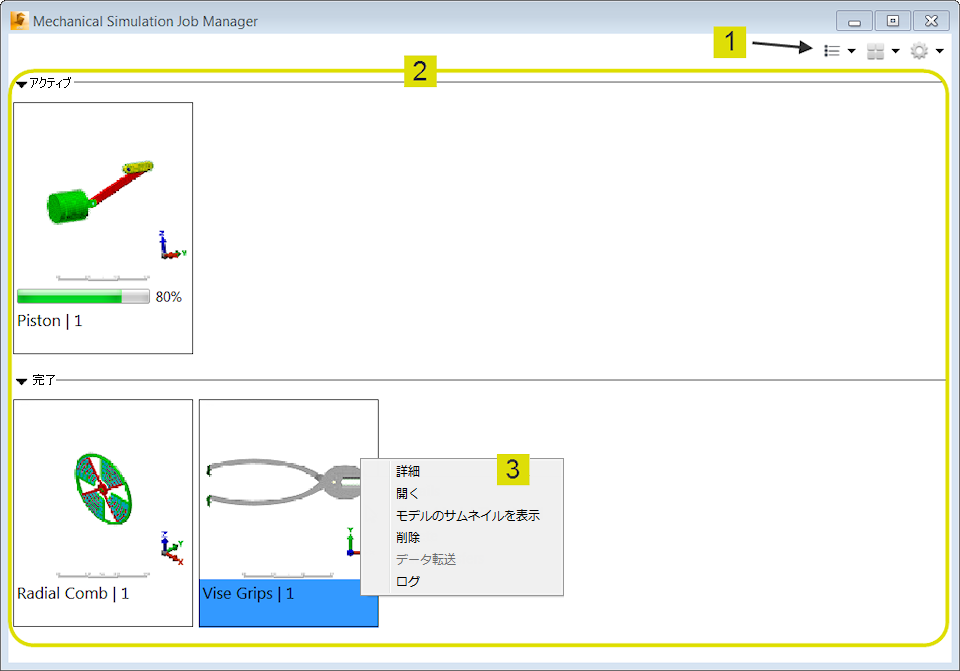
図 1: Mechanical Simulation Job Manager (中アイコン ビュー モード)
1. ツールバー
ツールバーには次の項目が含まれています。
- [ジョブ フィルタ]: 正常に完了したジョブまたはキャンセルされたジョブの表示を制御するには、このツールの設定を使用します。表示されるジョブのソート順序を制御することもできます。ソートは、次の条件に従って、昇順または降順で並べ替えます。
- 名前
- [ステータス]
- 進行状況 %
- 時間
- ソース コンピュータ
注: [ソース コンピュータ]ソート オプションは、すべてのタスクがローカル コンピュータ上で実行されるため、プログラムのデスクトップ バージョンには効果がありません。 - [サイズ]: サムネイル サイズ(図 1 に示すように、[小さい]、[中]、または[大きいアイコン])を指定したり、[リスト]ビュー オプションを選択したりするには、このツールを使用します。以下の図に示すように、[リスト]ビュー モードには追加の詳細が表示されます。
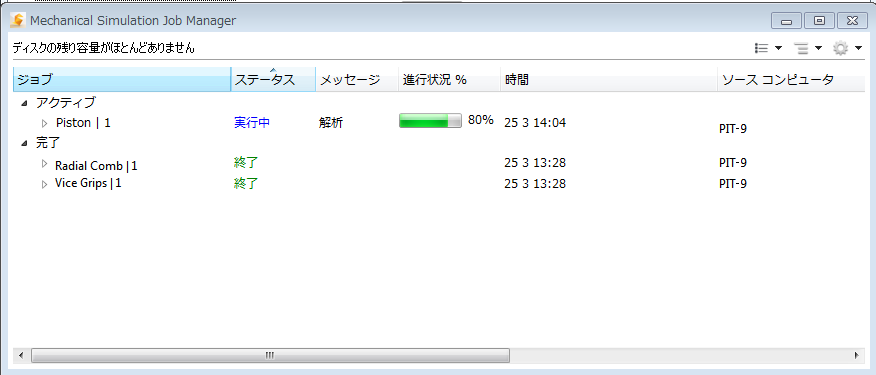
図 2: Mechanical Simulation Job Manager ([リスト]ビュー モード)
- [環境設定]: Mechanical Simulation Job Manager の動作をカスタマイズするには、[環境設定]を設定します。さらに、[ヘルプ]にアクセスしたり、[バージョン情報]情報ボックスを開いて、プログラムのバージョン番号とアクティブなポート番号を確認することができます。
2. ジョブ ビュー
ジョブ ビュー領域は、サムネイルの表示(図 1)であるかまたは、[リスト]ビュー モード(図 2)での表示であるかにかかわらず、2 つの部分に分かれています。
- [アクティブ]リスト(上部)は、現在実行中のジョブを監視します。各項目の進行状況バーは、シミュレーション プロセスがどのくらい完了しているかを示します。
- [完了]リスト(下部)は、以前に完了したジョブたまたはキャンセルしたジョブを表示します。感嘆符の付いた黄色の三角形のアイコン(
 )はキャンセルしたジョブに表示されます。
)はキャンセルしたジョブに表示されます。
3. コンテキスト メニュー(右クリック)
各ジョブ(サムネイルまたはリスト ビュー)ののコンテキスト メニューには、シミュレーションの進捗状況に関する洞察をさらに得るためのいくつかのツールが含まれています。メニューに表示されるオプションは、現在のコンテキストによって異なります。つまり、すべてのメニューを選択しなくてもすべての状況を入手できます。
- [詳細]: 選択したジョブの詳細ビューを開きます。詳細ビューは、ステータス(ジョブ タイプ、優先順位、スケジュールされた時間、開始された時間、終了した時間、ソース コンピュータ、およびモデルのサムネイル イメージ)を表示されます。実行中、進行状況バーはシミュレーションの進行状況を示します。詳細ビューを閉じるには、[OK]をクリックします。詳細ビューの例を次の図で示します。

図 3: Mechanical Simulation Job Manager (詳細ビュー)
- [モデルのサムネイルを表示]: *.png ファイル用の既定のアプリケーションでモデルのサムネイル イメージを開きます。このファイル タイプに対する Windows のファイルの関連付け設定でサムネイル イメージを開くアプリケーションを決定します。
- [キャンセル] (ジョブの実行中にのみ使用可能): すぐに実行中のジョブを停止します。それ以降の結果はハード ドライブに書き込まれません。 注: この方法で非線形解析を停止した場合、解析を再開しようとしても失敗することがあります。たとえば、一時ファイルを作成中にメカニカル・イベント・シミュレーション(MES)がキャンセルされたと仮定します。解析を再開しようとするとおそらくエラーになります。このような場合、最初から解析をリスタートする必要があります。
- [データ転送]: このオプションは、Simulation Mechanical のデスクトップ バージョンでは適用できません。表示はされますが、選択することはできません。
- [ログ]: ログ ファイルには、以下のような便利な情報が含まれています。
- 非線形反復の収束挙動
- 線形接触、ギャップ要素、またはケーブル要素の解析の収束計算履歴
- 非線形接触パラメータ
- 線形動解析の質量寄与率
- その他のデータ(プログラム バージョン、モデルの単位系、メモリ使用量、解析実行時間など)
エラーが発生した場合は、ログ ファイルが問題のトラブル シューティングに役立つことがあります。問題が発生した際には、テクニカル サポートのエンジニアがこのような情報の提出を求める場合があります。
- ([優先順位](ジョブの実行中にのみ使用可能): [ソルバ マネージャ]で指定された[優先順位を送信]値をオーバーライドするには、この設定を使用することができます。[優先順位]オプションは、(すべてのタスクを同時に実行するプロセッサの数が不足しているときに)解析されるジョブの順序を制御します。 注: ソフトウェアは自動的に解析依存を識別します。1 つのジョブがもう 1 つの結果に依存している場合、必須のジョブが依存しているジョブの前に実行されます。このような場合、Mechanical Simulation Job Manager の[優先順位]設定は必要なジョブの実行順序をオーバーライドしません。
使用可能な優先順位の選択肢は次のとおりです。
- [高い]: 低または標準の優先順位ジョブの前にこのタスクを送信します。
- [標準]: 既定の優先順位の設定です。すべてのジョブが標準の優先順位に設定されている場合は、送信順序はソルバ マネージャ内で指定した[優先順位を送信]設定に従います。
- [低い]: 標準または高の優先順位のジョブの後にこのタスクを送信します。
- [削除] (ジョブが完了したときにのみ使用可能): [完了]リストからジョブを削除します。ジョブはローカル コンピュータから削除されません。
複数のジョブを選択するには、クリックしたまま[Ctrl]または[Shift]キーを使用します。[Ctrl]を使用すると、1 つずつジョブの選択状態を切り替えることができます。ジョブの範囲を選択するには、[Shift]を使用します(最初のジョブをクリックして、選択する範囲内の最後のジョブを[Shift]クリックします)。
複数のジョブを選択する場合、コンテキスト メニューは、以下のように、選択されたジョブのタイプによって異なります。
- 複数のアクティブなジョブを選択した場合、唯一使用可能なコンテキスト メニューのオプションは、[キャンセル]です。
- 複数の完了したジョブを選択した場合、唯一使用可能なコンテキスト メニューのオプションは、[削除]です。
- アクティブなジョブと完了したジョブを組み合わせて選択した場合、使用可能なオプションは、[キャンセル]および[削除]です。[キャンセル]はアクティブなジョブにのみ影響し、[削除]は完了したジョブにのみ影響します。