![]()
-
选择 Biped >
 “运动”面板 > “Biped”卷展栏 >
“运动”面板 > “Biped”卷展栏 >  (足迹模式) > “足迹创建”卷展栏 >
(足迹模式) > “足迹创建”卷展栏 >  (跑动) >
(跑动) >  (创建多个足迹) > “创建多个足迹: 跑动”对话框
(创建多个足迹) > “创建多个足迹: 跑动”对话框
此对话框在选中“足迹创建”卷展栏上的“奔跑”时显示出来,然后单击“创建多个足迹”。
界面
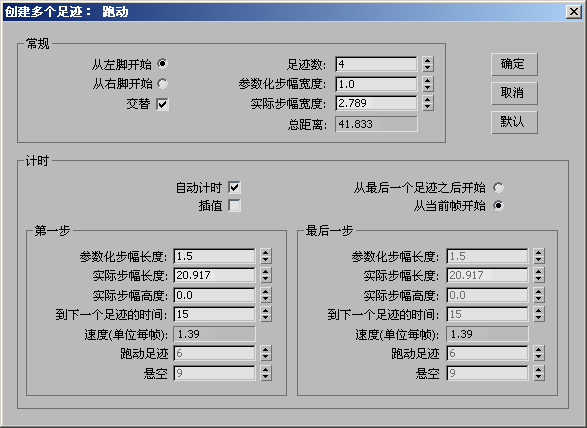
“通用”组
- 从左脚开始用左脚脚步开始足迹序列。
- 从右脚开始用右脚脚步开始足迹序列。
- 交替
- 打开此项以在左右脚足迹之间进行交替。当不选择此项时,就只有左脚足迹或右脚足迹,产生单脚奔跑效果。
- 足迹数
- 确定要创建的新足迹数。
- 参数化步幅宽度
- 以骨盆宽度的百分比来设置步幅宽度。
该参数值设为 1.0 生成一个与骨盆宽度相等的步幅宽度。该参数值设为 3.0 生成一个宽幅的、蹒跚的步幅。对此设置的更改会自动的改变实际步幅宽度。
参数化步幅宽度描述了 Biped 解剖方面的参数,而实际步幅宽度则用 3ds Max 单位来描述值。
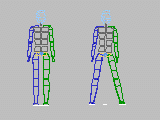
步幅宽度为 1 和步幅宽度为 3
- 实际步幅宽度
- 用建模单位设置步幅宽度。对此设置的更改会自动地改变参数化步幅宽度。
- 总距离
- 显示在当前设置下足迹移动的总距离。这个值不能直接更改。
“计时”组
- 自动计时
-
自动设置计时参数。
自动计时会影响以下奔跑步态的计时参数:
- 奔跑足迹、悬空
当选择了自动计时,这些参数就会自动地调整到合理的值。可以通过调整“步幅长度”和“下一个足迹的时间”参数来控制足迹序列。
当自动计时处于关闭状态,可以通过调整步态计时参数来控制足迹序列,但是不可以更改“下一个足迹的时间”参数。
- 奔跑足迹、悬空
- 插值
-
可以控制一系列脚步的加速或减速。当选中此项,“最后一步”内的一组脚步参数就可以使用。
Biped 创建的足迹以“第一步”参数值开始并以“最后一步”参数值结束。
在这两个值之间插值,Biped 就可以生成随时间而改变的足迹。
不选此项时,“最后一步”参数就会变灰。Biped 仅使用“第一步”参数来创建所有的足迹。
- 从最后一个足迹之后开始将新建的足迹附加到现有足迹序列的末尾。
- 从当前帧开始在现有足迹序列后的当前帧插入新建的足迹,允许在足迹再次开始之前存在一个时间间隔。
“第一步”和“最后一步”组
- 参数化步幅长度
- 以 Biped 腿部长度的百分比来设置新足迹的步幅长度。默认值 1.5 会生成典型的跑动步幅。
该值设为 1.0 生成一个与腿部长度相等的步幅长度,它使 Biped 稍微地拉伸腿部就能到达下一个脚步。该值设为 0.0 会使 Biped 在原地奔跑。负的步幅长度值会使 Biped 向后奔跑。
当 Biped 向后奔跑时,它并不是简单地反转向前运动,而是维持了正确的脚步状态序列,即脚趾先接触地面,然后再是脚后跟。
调整“参数化步幅长度”会自动地更改“实际步幅长度”的值。
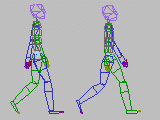
步幅长度为 0.75 和 步幅长度为 1
- 实际步幅长度
- 用 3ds Max 单位设置新足迹的步幅长度。
“参数化步幅长度”的规则(如上所述)同样适用于此。
调整“实际步幅长度”会自动地更改“参数化步幅长度”的值。
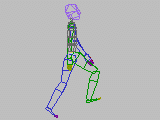
步幅高度为 5 单位
- 实际步幅高度
- 设置足迹之间的上升或下降。可以使用这个参数来创建一组上下斜坡或上下楼梯的足迹。
实际步幅高度值是每个新足迹之间的高度差异。正值向上步进,负值向下步进。
- 到下一个足迹的时间
- 指定每只脚运动循环的帧数。循环在 Biped 的脚接触地面的那一帧开始,接着是抬脚、移动,最后在脚再次接触地面之前的那一帧结束。此参数只有在“自动计时”打开时才能使用。
- 速度
- 显示 Biped 在每帧中运动的单位数。此参数会随着其它参数的改变而改变,但是不能直接对它进行调整。
以下两个参数只有在“自动计时”关闭时才能使用。可以用这些参数替换“自动计时”来控制一系列足迹的向前运动速度。
- 奔跑足迹
- 指定在奔跑期间单脚着地的帧数。
帧数越高,Biped 的脚接触地面的时间就越长,因此奔跑运动的速度也就越慢。
足迹 2 和 3 分别着地 5 帧
- 悬空
- 指定在足迹之间躯体腾空的帧数。
帧数越高,每一步中 Biped 悬在空中的时间就越长,因此奔跑运动的速度也就越慢。