Biped 的反向运动解决方案有三种参数,设置于手臂和腿关键帧轨迹的每一关键点。
当肢体通过每一关键点运动时:
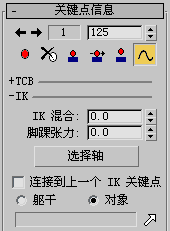
- IK 混合设置运动插值以便达到正向运动和反向运动动态混合。允许将摇摆型运动与手和脚的直接运动结合。旋转手臂来移动手就是正向运动的一个例子。使用手的位置来使手臂移动则是反向运动的一个例子。默认混合值是 0.0,或者是完全的正向运动。IK 混合值是 1.0 则是完全的正向运动。
- 躯干或者对象决定 IK 路径的参考坐标空间。从而允许将 IK 路径与角色躯干一起移动,或者临时附加手或者脚以便遵循其他对象。默认对象是躯干。
- 连接到上一个 IK 关键点决定关键点是否是前一关键点的部分(以及与前一关键点是否具有相同的参考位置)。
Biped 有三种自动的方法来设置这些参数。使用这三种参数的不同结合设置踩踏关键点、滑动关键点、或者自由关键点。
- 设置踩踏关键点创建 IK 混合值设置为 1.0 的关键点,“对象和链接到上一个 IK 关键点”打开。
- 设置滑动关键点与 IK 混合值设置为 1.0 的关键点,“对象”打开,“连接到上一个 IK 关键点”关闭。
- 设置自由关键点创建 IK 混合值设置为 0 的关键点,并且使“躯干”打开。“连接到上一个 IK 关键点”关闭。
IK 混合
“IK 混合”控件位于“关键点信息”卷展栏上;展开 IK 分隔条时可以看到。在关键帧模式下设置 IK 混合值。
IK 组参数
对任何手或者脚的轨迹,可以设置每一个关键的 IK 混合值。在某一特别关键点,IK 混合值设置确定手臂或者腿是否使用反向运动、正向运动或者两个运动解决方案的混合形式来移动它。
值为 0.0 的 IK 混合值意味着完全正向运动。手臂(或者腿)通过在关键点插补关节的旋转来进行移动。这种情况下,手(或者脚)倾向于边向前走边划圆弧,并且这种运动看起来是通过明显的关节摇摆来激发的。
在手(或者脚)被当作末端效应器来使用时候,值为 1.0 的 IK 混合值意味着完全反向运动。样线条路径通过手的关键点来计算,而手则沿着样线条移动。将计算手臂其它部分的关节角度,以使手遵循样条线。在这种情况下,直接由手(或者脚)定位。
值介于 0.0 和 1.0 之间的 IK 混合值意味着是反向运动和正向运动的结合;当 IK 混合值接近于 0.0 时候,正向运动在解决方案中占有更大的比重,当 IK 混合值接近于 1.0 时,反向运动则占有更大的比重。
当您想要手臂摇摆,比如 Biped 行走时,最好是做正向运动。然而,就一位拳击手而论,攻击时因为手必须遵循定向的路径,因此使用反向运动。
要设置关键点的 IK 混合值,请执行以下操作:
-
 通过选择 Biped 的手臂或腿的一个或多个部位,选择单个手臂或腿的轨迹。
通过选择 Biped 的手臂或腿的一个或多个部位,选择单个手臂或腿的轨迹。 只有当单个手臂或者腿的轨迹被选中时,才能启用 IK 混合值样条线以及其他 IK 领域内的控件。
-
 如果不存在关键点,则设置一个关键点。
如果不存在关键点,则设置一个关键点。 - 设置 IK 混合值的期望值。
躯干和对象选项
在默认情况下,Biped 使用其躯干的重心坐标系统,或身体坐标系统来计算运动的解决方案。这意味着当角色移动时,手(或者脚)的 IK 路径就随着对象转换和旋转。例如说,拳击手的手轨迹总是相应地随着其躯体的迂回前进,上下来回移动,以及转身而移动。
对象选项用来制作场景中的肢体和其他对象之间的动态链接动画。
当 Biped 的手臂或者腿(手和脚)的关键点处于当前位置时,IK 混合值控件被激活。
连接到上一个 IK 关键点
IK 约束用来指定是否足迹是滑动还是踩踏。如果“连接到上一个 IK 关键点”开启,那么 Biped 的脚保持上一个关键点的参考位置,保持脚踩地。在一个足迹过程中,如果“连接到上一个 IK 关键点”关闭,那么脚将移动到创建滑动足迹的新位置。
“连接到上一个 IK 关键点”也执行将 Biped 的手锁定在空间的功能。在 Biped 手臂上使用“设置踩踏的关键点”可锁定他们在空间中的位置。