接触类型
HumanIK 为您的角色的脚和手提供了四种不同的管理地板接触的模式,称为“接触类型”。您选择的接触类型决定了 HumanIK 使用您在辅助特性集内提供的度量,构建角色的脚或手轮廓的方式。
这些可用的接触类型以及每种类型解释其辅助特性的方式如下所述。有关设置接触类型的详细信息,请参见设置脚和手接触。
选择接触特性值
如果您可以访问组织中的 Autodesk MotionBuilder,强烈建议您或美工人员使用它来确定以下部分描述的特性的最佳值。MotionBuilder 可以在视口中渲染标记的位置,这样您就可以轻松可视化地板接触解算器可辨识的脚和手的尺寸。此外,您可以直接在 MotionBuilder 视口中尝试使用 HumanIK 地板接触引擎,测试设置的结果,并对所做的任何调整的结果获得即时可视化反馈。这样可以更快、更轻松地确定最佳值。
普通接触类型
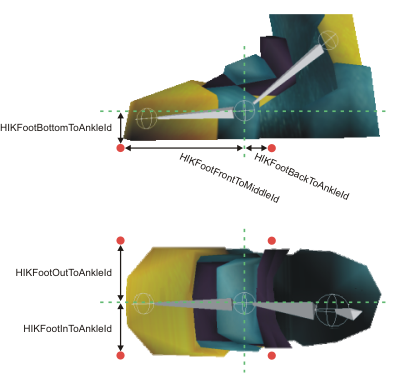
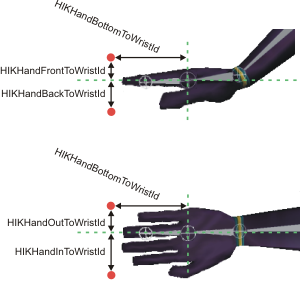
使用普通接触类型时,角色的每只脚和手均由六个标记进行定义,在下图中以红色显示。这些标记的位置是相对于角色的踝关节或腕关节(LeftAnkleNodeId、RightAnkleNodeId、LeftWristNodeId 和 RightWristNodeId 节点)指定的。
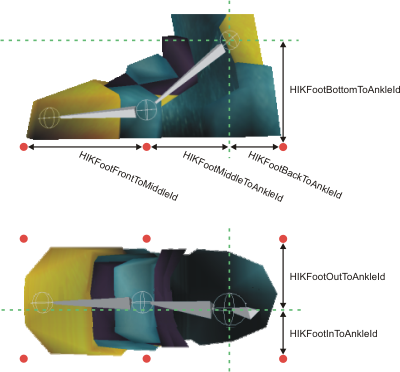
这些标记定义两个平面:一个用于脚底或手心,另一个用于脚趾或手指。这两个平面在脚趾或手指的根部(上图中间标记的位置)进行铰接,以允许 HumanIK 在需要时弯曲脚部。为了获得最佳效果,您应将此铰链放置在紧挨着角色趾根或指根下方的位置,即脚或手弯曲的位置。如果您的角色具有由 HumanIK 控制的单独铰接的手指和脚趾,应考虑也设置脚趾和手指接触。请参见下面的设置脚和手接触。
踝或腕接触类型
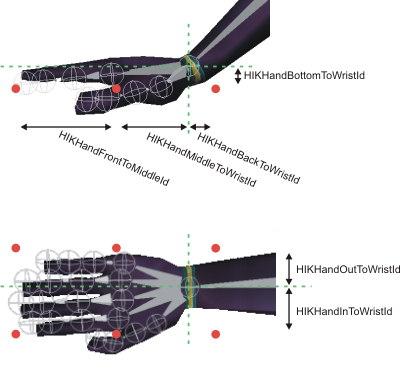
使用踝或腕接触类型时,角色的每只脚和手均由四个标记进行定义,在下图中以红色显示。这些标记的位置是相对于角色的踝关节或腕关节(LeftAnkleNodeId、RightAnkleNodeId、LeftWristNodeId 和 RightWristNodeId 节点)指定的。
这些标记定义表示整只脚或手的单个平面。当任何标记触到平面时,脚或手不会在除踝/腕以外的任何位置弯曲:它被视为类似脚蹼的单个对象。此方法最适合于没有由 HumanIK 控制的脚内侧或手内侧关节的角色,以及没有由 HumanIK 控制的单独铰接手指和脚趾的角色。
趾根或指根接触类型
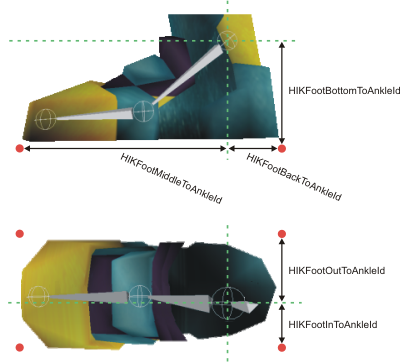
使用趾根或指根接触类型时,角色的每只脚和手均由四个标记进行定义,在下图中以红色显示。这些标记的位置是相对于角色的脚或手关节(LeftFootNodeId、RightFootNodeId、LeftHandNodeId 和 RightHandNodeId 节点)指定的。

这些标记定义表示脚或手的前部的单个平面,位于角色的脚内侧或手内侧关节的前面。但是,使用此方法时,角色的踝或腕仍可通过平面。因此,此方法最适合使用脚趾行走的角色,或只使用后脚的前掌着地的四足动物(例如,狗)的后腿。
如果您的角色没有由 HumanIK 控制的脚或手关节,则相对于踝和腕关节(LeftAnkleNodeId、RightAnkleNodeId、LeftWristNodeId 和 RightWristNodeId 节点)确定标记的位置,以使此方法在功能上等同于上面所述的踝/腕接触类型。
蹄接触类型
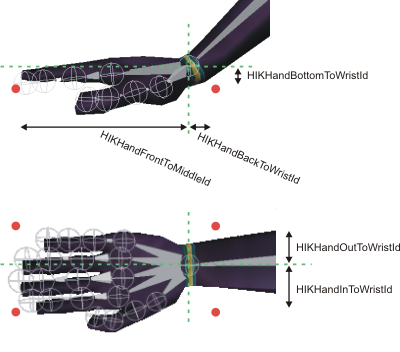
使用蹄接触类型时,角色的每只脚和手均由四个标记进行定义,在下图中以红色显示。这些标记的位置是相对于角色的脚或手关节(LeftFootNodeId、RightFootNodeId、LeftHandNodeId 和 RightHandNodeId 节点)指定的。
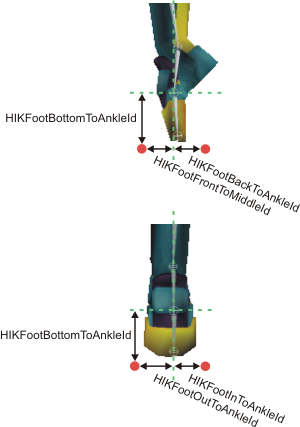
这些标记定义表示脚尖或手尖的单个平面。此方法最适合于其最后一块脚骨几乎垂直于地面的角色,如蹄类动物或用足尖跳舞的芭蕾舞演员(趾尖指地,如上图中所示)。此方法中的角色通常没有由 HumanIK 控制的单独铰接的脚趾或手指。
当该接触类型中的某个标记接触地面时,HumanIK 会尝试旋转踝/腕或脚/手关节,以使其他标记也与地面接触。此行为往往会为蹄类角色生成更稳固的立足点。
如果您的角色没有由 HumanIK 控制的脚或手关节,则相对于踝和腕关节(LeftAnkleNodeId、RightAnkleNodeId、LeftWristNodeId 和 RightWristNodeId 节点)确定标记的位置。
 除非另有说明,否则此作品受到 Creative Commons 署名-非商业性使用-相同方式共享 3.0 未本地化版本许可证的制约。请参见 Autodesk Creative Commons 常见问题(英文)以获取更多信息。
除非另有说明,否则此作品受到 Creative Commons 署名-非商业性使用-相同方式共享 3.0 未本地化版本许可证的制约。请参见 Autodesk Creative Commons 常见问题(英文)以获取更多信息。