默认 T 形站姿
为了使 HumanIK 解算器控制角色,该角色必须初始化为处于基本 T 形站姿,该站姿为 HumanIK 生物力学模型提供有关角色骨架的几何体和比例的重要信息。
角色的 T 形站姿必须尽可能与以下给定的描述和示例相匹配,以便使 HumanIK 反向运动学和重定目标解算器为角色生成精确的结果。如果未正确配置 T 形站姿,HumanIK 解算器的所有运算将基于错误的数据,并很可能产生出歪斜、古怪或意想不到的姿势。
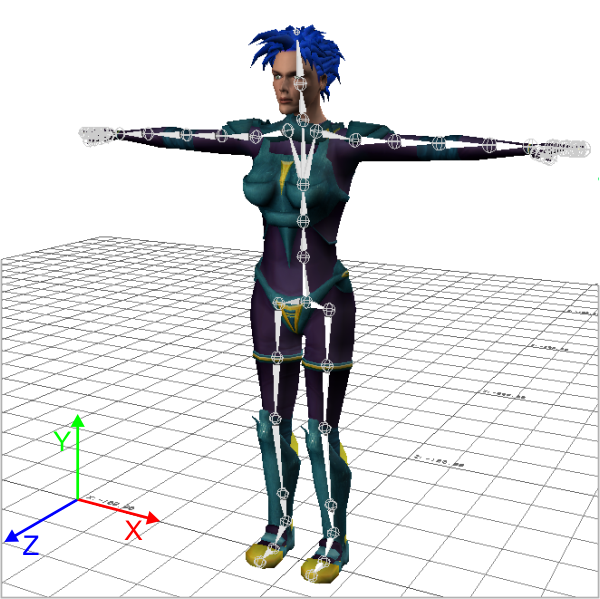
- 角色必须面向 Z 轴的正方向。
- 角色的手臂必须沿 X 轴伸展。因此,角色的左臂应指向 X 轴的正方向。
- 角色的头顶必须向上,即位于 Y 轴的正方向上。
- 角色的手应展平,手掌朝向地面,拇指平行于 X 轴。
- 角色的脚可以垂直于腿(即脚趾沿 Z 轴平行,如下图所示),也可以沿腿的方向继续(即脚趾笔直向下)。脚不得绕 Y 轴旋转(即,左脚脚趾不应向内朝向右腿,也不应向外远离右腿,反之亦然)。
四足动物
HumanIK 可用于在运行时控制四足动物以及两足动物。如果为四足动物的角色创建角色化,则必须将角色骨架设置为上图所示的相同 T 形站姿。尽管此两足动物 T 形站姿对于四足动物而言明显有些古怪和站不住脚,但您必须将角色设置为该两足动物姿势,才能确保 HumanIK 可以正确地设置角色骨架的几何体和比例。
设置 T 形站姿
根据所选择的用于对角色进行角色化的方法,以不同的方式为 HumanIK 提供此 T 形站姿。
- 如果以编程方式创建角色,初始化代码必须为角色中的每个节点设置反映如上所示 T 形站姿的平移、旋转和缩放值。有关此过程的详细信息,请参见以编程方式角色化 HIKCharacter。
- 如果使用角色化工具创建角色化,角色的默认 T 形站姿派生自您映射到 HumanIK 节点的骨骼的平移、旋转和缩放。根据角色化工具导出的角色化文件内容创建 HIKCharacter 之后,将无法更改 T 形站姿。
请参见以可视化方式角色化 HIKCharacter。有关使用角色化工具的详细信息,请参见其附带文档。
 除非另有说明,否则此作品受到 Creative Commons 署名-非商业性使用-相同方式共享 3.0 未本地化版本许可证的制约。请参见 Autodesk Creative Commons 常见问题(英文)以获取更多信息。
除非另有说明,否则此作品受到 Creative Commons 署名-非商业性使用-相同方式共享 3.0 未本地化版本许可证的制约。请参见 Autodesk Creative Commons 常见问题(英文)以获取更多信息。