![]()
Damit die Bewegung eines Bipeds natürlicher wirkt, sind manche Gelenke des Bipeds, z. B. die Ellenbogen und die Knie in ihren Drehungsmöglichkeiten beschränkt. Gelenke, die Drehungen um alle drei Achsen (X, Y und Z) zulassen, haben drei Freiheitsgrade (DOF, Degrees of Freedom). Um die Freiheitsgrade eines Gelenks zu ändern, wählen Sie es aus und legen in der Hierarchiegruppe im Rollout "Sperren" die gewünschten Optionen fest.
Die untenstehende Tabelle zeigt die Freiheitsgrade der einzelnen Verbindungen. Biped ermöglicht einen etwas größeren Bewegungsspielraum, als bei den meisten realen menschlichen Körpern möglich ist. Alle Drehungen erfolgen im lokalen Koordinatensystem.
Informationen zum Drehen des Biped-Beckens in allen drei Dimensionen finden Sie unter Becken als Kugelgelenk.
Bewegungsbeschränkungen bei Bipeds
Manche Biped-Teile weisen Bedingungen auf, durch die mögliche Transformationen in speziellen Fällen eingeschränkt sind. Dies wird in den folgenden Abschnitten beschrieben.
| Biped-Verbindung | Verbindungsname | Freie Achsen | Anmerkungen |
|---|---|---|---|
| Massenmittelpunkt | Bip001 (Vorgabe) | X, Y, Z | Dreht gesamten Biped |
| Becken | Becken | X, Y, Z | Wenn Füße aufgesetzt sind, müssen die Beine angepasst werden, damit sich Füße und Zehen über dem Boden befinden |
| Kopf | Kopf | X, Y, Z | |
| Hals | Hals | X, Y, Z | Ausrichtung des Halses ist unabhängig von der des Kopfes |
| Wirbelsäule | Wirbelsäule, Wirbelsäule1-4 | X, Y, Z | Gesamtes Gleichgewicht durch Wirbelsäulendrehung festgelegt |
| Schwanz | Schwanz, Schwanz1-4 | X, Y, Z | |
| Schlüsselbeine | R Arm, L Arm | Y, Z | Schulterausrichtung hat keine Wirkung auf die Schlüsselbeinausrichtung |
| Schultern (Oberarm) | R Oberarm, L Oberarm | X, Y, Z | Drehpunkte von Schulter bis Handgelenk |
| Ellbogen (Unterarm) | R Unterarm, L Unterarm | X, Z | Scharnier sowie spezielle Drehung |
| Hüfte (oberes Bein) | R Oberschenkel, L Oberschenkel | X, Y, Z | Drehpunkte von Hüfte bis Knöchel |
| Knie (unteres Bein) | R Unterschenkel, L Unterschenkel | X, Z | Scharnier sowie spezielle Drehung |
| Hände | R Hand, L Hand | X, Y, Z | |
| Füße | R Fuß, L Fuß | X, Y, Z | Wenn Füße aufgesetzt sind, müssen die Beine angepasst werden, damit sich Füße und Zehen über dem Boden befinden |
| Finger | Finger0, 01, 02 Finger1, 11, 12 etc. | X, Y, Z | Fingeransätze weisen drei freie Achsen auf, andere Fingergelenke dagegen nur die Z-Achse |
| Zehen | Zehe0, 01, 02 Zehe1, 11, 12 etc. | X, Y, Z | Zehenansätze weisen drei freie Achsen auf, andere Zehengelenke dagegen nur die Z-Achse |
Becken als Kugelgelenk
Das Becken kann um alle drei Achsen (X, Y, Z) gedreht werden. Dieses Kugelgelenk ermöglicht drei Freiheitsgrade und erlaubt flexiblere Animationen von Bipeds, da die Drehungen des Beckens von der Drehung des Massenmittelpunkts unabhängig sind. Dadurch wird die Bewegungsbahn des Massenmittelpunkts fließender, was sich auch auf den Kopf und die Arme des Bipeds auswirkt. Die Bewegungen im Drehraum des Massenmittelpunkt des Körpers wirken dadurch natürlicher.
Beachten Sie, dass sich die Funktionsweise dabei verändert:
- Die Bewegung des Beckens mit drei Freiheitsgraden wird im Kurveneditor und im Labor in Form dreier getrennter Euler- oder Quaternion- (TCB-)Funktionskurven angezeigt.
- Wenn Sie die Key-Reduzierung auf die Wirbelsäule des Bipeds anwenden, erhalten Sie bessere Ergebnisse.
- Die Drehungen um die neuen Beckenachsen (X und Z) sind in Layern animierbar und werden in MAXScript unterstützt.
- Die vorgegebene parametrische Schrittanimation wird für das Becken mit drei Freiheitsgraden geringfügig angepasst.
- Wenn Sie Legacy-Medien wie z. B. BIP-Dateien in den 3ds Max-Biped laden, werden die Daten für das Becken an die neuen Freiheitsgrade und an den neuen Koordinatenraum, in dem das Becken gedreht werden kann, angepasst.
- Medien mit neuen Spuren für die Beckendrehung können mit dem Bewegungsmischer oder mit dem Bewegungsfluss mit alten Medien verschmolzen werden, die keine solchen Spuren enthalten.
Spezielle Drehung: Ellbogen und Knie
Ellbogen und Knie führen eine spezielle Drehung durch, wenn sie um ihre X-Achse gedreht werden. Sie drehen sich nicht wirklich um ihre X-Achse. Dies wäre sinnlos, da sie nur einen Freiheitsgrad aufweisen. Stattdessen wird der Oberarm bzw. der Oberschenkel zusammen mit dem Unterarm bzw. Unterschenkel um eine unsichtbare Achse gedreht, die durch die Linie definiert ist, die von der Schulter zum Handgelenk und von der Hüfte zum Fußgelenk verläuft. Diese "spezielle Drehung" kann bei der Positionierung der Arme und Beine sehr hilfreich sein.
Diese spezielle Drehung ist außerdem nützlich, wenn Sie Figuren mit umgekehrter Kniebeugung erstellen möchten. Wenn die Knie rückwärts gedreht werden (um mehr als 90 Grad im Verhältnis zu der von vorn betrachteten menschlichen Kniestellung) nimmt Biped an, dass die Figur nach hinten gebeugte Knie oder "Vogelknie" hat, und verwendet dies als eine Referenzposition für allebip-Bewegungen.
Bei Drehung des Unterarms um die X-Achse drehen sich die Armelemente um eine unsichtbare Achse zwischen Schulter und Handgelenk.
Balance: Wirbelsäule
Biped hält den Biped ausschließlich mithilfe der Wirbelsäule zusammen mit dem Massenmittelpunkt im Gleichgewicht. Wenn Sie die gesamte Wirbelsäule oder eine ihrer Verbindungen drehen, wird aus diesem Grund die horizontale Position des Körpers relativ zum Schwerpunkt geändert. Diese Anpassungen werden im lokalen Referenz-Koordinatensystem des Schwerpunkts durchgeführt. Sie sorgen dafür, dass sich die Figur natürlich um ihren Schwerpunkt dreht, z. B. bei Umkehrungen in der Luft.
Sie können dieses Verhalten in der Bewegungsgruppe im Rollout "Key-Info" deaktivieren, indem Sie den "Balancefaktor" für die entsprechenden Massenmittelpunkt-Keys auf 0,0 festlegen. Das Steuerelement "Balancefaktor" befindet sich im Rollout im Bereich "Körper".
Unabhängige Ausrichtung: Arme, Kopf, Füße
Wenn die Ausrichtung eines Schlüsselbeins (des Stammobjekts des Arms) geändert wird, ändert sich die Position, aber nicht die Ausrichtung des entsprechenden Oberarms. Effektiv sind die Schlüsselbeine die Halterung der Arme.
Ebenso wird über die Ausrichtung des Halses die Position, aber nicht die Ausrichtung des Kopfes geändert. Der Kopf ist zwar mit dem Hals verbunden, dreht sich aber normalerweise unabhängig von ihm, und durch das Zusammenwirken dieser unabhängig festgelegten Ausrichtungen wirkt die Bewegung natürlicher.
Ähnlich wie beim Kopf und den Armen wird durch eine Änderung der Ausrichtung des Ober- oder Unterschenkels die Position, aber nicht die Ausrichtung des entsprechenden Fußes geändert. Somit steht die Ausrichtung des Fußes weiterhin in Bezug zur Grundebene.
Anpassen von Keys mit TCB-Drehung
Anstatt zusätzliche Keys zu erstellen, um die Bewegung von Biped-Gliedmaßen nachzubessern, können Sie mit den TCB-Steuerelementen bereits vorhandene Keys einstellen, um das Nachlassen und die Bewegungsbahnen der Gliedmaßen abzustimmen.
Visuelle Darstellung von Rotationsanimationen mithilfe von Funktionskurven
Rotationsanimationen können auch mithilfe des Kurveneditors visuell dargestellt werden. Wenn Sie einen Key hinzufügen, wird er angezeigt und mit den anderen Keys zu einer Kurve verbunden, die Ihre Animation darstellt. Die Rotationskurve kann als Quaternion- oder Eulerkurve angezeigt werden. Verwenden Sie dafür denTCB-Rotations-Controller bzw. den Euler-XYZ-Controller (im Rollout "Quaternion/Euler") Die beiden Controller wirken sich unterschiedlich auf die Kurve aus, da sie jeweils eigene Berechnungen für die Rotation vornehmen. Weitere Informationen hierzu finden Sie unter Arbeiten mit Euler-Kurven bei Biped-Animationen.
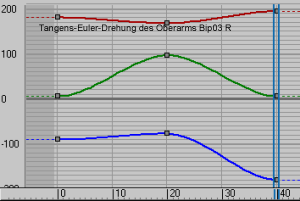
Tangens-Euler-Rotationskurve
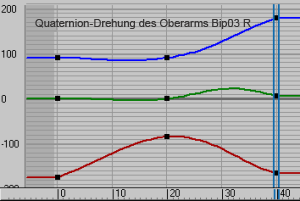
Quaternion-Rotationskurve
Prozeduren
So ändern Sie die TCB-Parameter für einen Biped-Arm:
- Aktivieren Sie im Rollout "Key-Info" die Option
 (Bewegungsbahnen).
(Bewegungsbahnen). -
 Wählen Sie einen Biped-Arm aus.
Wählen Sie einen Biped-Arm aus. - Ermitteln Sie mit
 (Nächster Key) oder
(Nächster Key) oder  (Vorheriger Key) einen Arm-Key.
(Vorheriger Key) einen Arm-Key. - Wenn der Bereich "TCB" noch nicht angezeigt wird, klicken Sie auf die TCB-Abtrennung.
- Stellen Sie die Zahlenauswahlfelder "Spannung", "Kontinuität" und "Neigung" ein.
Die Bewegungsbahn ändert sich den neuen Parametern entsprechend. Geben Sie die Animation wieder, um die Änderung zu sehen.
Tipp: Sie können auf die TCB-Steuerelemente auch zugreifen, indem Sie mit der rechten Maustaste auf Keys in der Spurleiste klicken und dann "Spuransicht > Kurveneditor" oder die Labor-Kurvenansicht wählen.