Die Software automatisiert zwar viele der Parameter, die sich auf den Fläche-Fläche-Kontakt beziehen, aber einige Modelle können von Anpassungen durch den Benutzer profitieren. Diese Seite bietet eine Übersicht über viele Tipps, die die Laufzeiten des Mechanischen Ereignissimulators und von nichtlinearen Spannungsmodellen verbessern können, die Kontaktflächen enthalten.
Korrekte Netze
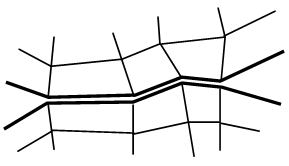
Damit die durchgeführte Kontaktanalyse genau ist, sollten die Kontaktflächen verhältnismäßig glatt und von einem gleichmäßigen Netz umgeben sein. Da die Ausrichtung des Flächennetzes die Leistung der gesamten Analyse beeinträchtigen kann, sollte darüber hinaus die Flächenvernetzung aller benachbarten Kontaktflächen sorgfältig durchgeführt werden, um eine bessere Konvergenzrate zu erzielen. Bei linearen Kontakten sollten die Netze auf den beiden Flächen perfekt aneinander angepasst werden, wie in Abbildung 1 (a) gezeigt wird. In MES können perfekt angepasste Netze jedoch zu schwerwiegendem Flattern der Kontakte führen. Wenn dieses Flattern auftritt, ist eine sehr schlechte Konvergenzrate unvermeidlich (längere Laufzeit). Um dieses Problem zu vermeiden oder wenigstens zu minimieren, wenn eine relative geringe Bewegung zwischen den Kontaktflächen erwartet wird, wird empfohlen, dass im Netz die Knoten einer Fläche in der Mitte der Knoten der anderen Fläche liegen sollten, wie in Abbildung 1 (b) gezeigt wird.
(Ausnahme: Bei Verwendung der Punkt-zu-Punkt-Kontaktart müssen die Netze übereinstimmen. Punkt-zu-Punkt basiert jedoch nicht auf einer relativen Bewegung der Knoten. Weitere Informationen finden Sie auf der Seite Fläche-Fläche-Kontakte: Optionen.)
Verwenden Sie für die Vernetzung von CAD-Modellen die Option Bauteilanpassung verhindern, die auf der Seite Netzeinstellungen des Modells: Modell beschrieben wird.
|
| (a) Bei linearer Spannung muss das Netz übereinstimmen, damit der Kontakt korrekt ist. |
|
| (b) In MES sollten die Netze bei Verwendung des Fläche-Fläche-Kontakts oder Punkt-Fläche-Kontakts nicht übereinstimmen, insbesondere dann, wenn die Bewegung relativ gering ist. |
| Abbildung 1: Korrektes Netz für die Kontaktanalyse |
Iterative Schemas
Der Gleichungslöser stellt sechs Arten von nichtlinearen Lösungsschemas bereit (auf der Registerkarte Setup  Modell einrichten Parameter Weitere Einstellungen Gleichgewicht), um den iterativen Lösungsvorgang zu steuern: eine geänderte Newton-Raphson-Methode, eine vollständige Newton-Raphson-Methode, eine kombinierte Newton-Raphson-Methode sowie diese drei Optionen mit der Zeilensuche. Es lässt sich nicht einfach sagen, welche Methode die beste Option aus. Die vollständige Newton-Raphson-Methode mit oder ohne Zeilensuche wird für eine Kontaktanalyse jedoch dringend empfohlen, damit eine Konvergenz mit möglichst wenigen Iterationen erfolgt.
Modell einrichten Parameter Weitere Einstellungen Gleichgewicht), um den iterativen Lösungsvorgang zu steuern: eine geänderte Newton-Raphson-Methode, eine vollständige Newton-Raphson-Methode, eine kombinierte Newton-Raphson-Methode sowie diese drei Optionen mit der Zeilensuche. Es lässt sich nicht einfach sagen, welche Methode die beste Option aus. Die vollständige Newton-Raphson-Methode mit oder ohne Zeilensuche wird für eine Kontaktanalyse jedoch dringend empfohlen, damit eine Konvergenz mit möglichst wenigen Iterationen erfolgt.
Verwenden von Abhängigkeiten zum Stabilisieren des Modells
Es kann zwar realistisch sein, dass sich Bauteile frei bewegen und berühren können, aber einige Modelle können verbessert werden, indem die Bauteile teilweise fixiert werden. Ein Stift, der ein Gabelstück und einen Gabelkopf durchdringt, kann sich in der Praxis zwar frei drehen, aber in der Regel dreht er sich nicht, da keine Kraft anliegt, die eine Drehung des Stifts verursacht. Wenn Abhängigkeiten angewendet werden, die eine Drehung des Stifts verhindern, kann in diesem Fall das Kontaktflattern (Oszillierung zwischen dem Kontakt mit benachbarten Elementen) reduziert werden, das auftreten kann, wenn sich der Stift dreht. Ebenso ist die axiale Bewegung des Stifts möglicherweise unbedeutend, sodass Abhängigkeiten, die eine axiale Bewegung verhindern, die Laufzeit reduzieren können.
Konvergenzraten
Beobachten Sie den Restwert (letzte Spalte des Analyseprotokolls) während der Ausführung des Modells. Wenn der Solver die Größe des Zeitschritts unnötig zu reduzieren scheint (auch wenn der Restwert kleiner wird und die Lösung sich einer Konvergenz zu nähern scheint), ändern Sie die Einstellung Trigger verkleinern: Konvergenzrate von Automatisch in Vermieden. Diese Einstellung befindet sich auf der Registerkarte Setup Modell einrichten Parameter Weitere Einstellungen Zeitschritt. Wenn sich die Lösung einer Konvergenz annähert, aber der Zeitschritt verringert wird, da die angegebene maximale Anzahl an Iterationen erreicht wird (Vorgabe = 15), erhöhen Sie die Anzahl der Iterationen. Es ist besser, mehr Iterationen zuzulassen, als den Zeitschritt zu teilen und den Iterationsvorgang erneut zu starten. Diese Einstellung befindet sich auf der Registerkarte Gleichgewicht des Dialogfelds Analyse: Parameter: Weitere Einstellungen.
Automatische Einstellungen oder keine automatischen Einstellungen
Der schwierigste Schritt bei der Kontaktanalyse ist die Bestimmung der geeigneten Kontaktparameter. Wenn der Benutzer für einen Kontaktparameter die Einstellung Automatisch wählt, berechnet der Gleichungslöser einen geeigneten Wert basierend auf der Geometrie der ersten Kontaktfläche, dem Netz und den Materialkonstanten. Dieser vorgegebene Wert kann jedoch ungültig werden, wenn die Körper großen Verformung ausgesetzt sind. Wenn zu erwarten ist, dass das Kontaktbauteil großen Verformungen ausgesetzt ist, sollte der Benutzer diese Elemente berücksichtigen, bevor er die Analyse startet und einen geeigneten Wert bestimmen.
Kontaktsteifheit
Die Faustregel ist, eine Kontaktsteifheit von einem Zehntel des Moduls des weicheren Materials zu verwenden. Wenn ein sehr weiches Material Kontakt mit einem steifen Material hat (z. B. Schaumstoff und Metall), ergeben die Ein-Zehntel-Regel und die Gleichung zur Berechnung der Steifheit möglicherweise keinen geeigneten Wert, sondern führen zu Kontaktflattern oder großer Durchdringung. Auch wenn das anpassungsfähige Kontaktsteifheitsschema verwendet wird, ist eine schlechte Konvergenz unvermeidbar, bis ein geeigneter Steifheitswert nach mehreren Iterationen gefunden wird. In solchen Fällen muss der Benutzer einige Testfälle mit einem einfachen 2D-Kontaktmodell unter Verwendung der gleichen Material- und Lastbedingungen untersuchen. Testen Sie einfach verschiedene Kontaktsteifheiten, und erhöhen (bzw. verringern) Sie den Wert um den Faktor 10, wobei Sie mit einer im Vergleich zum Elastizitätsmodul relativ kleinen Zahl beginnen, bis Sie den kleinsten Wert gefunden haben, der keine großen Durchdringungen zulässt. Wenn der erste Test abgeschlossen ist, überprüfen Sie die Konvergenzrate, indem Sie einfach die Anzahl der Iterationen zählen. Wenn die globale Konvergenz nicht gut ist und keine große Durchdringung vorkommt, ist der Steifheitswert möglicherweise zu groß und muss reduziert und erneut getestet werden.
Weitere Informationen finden Sie im Abschnitt zur Registerkarte Allgemein auf der Seite Erweiterte Steuerungen.
Kontakttyp
Es gibt drei Kontaktebenen bei Fläche-Fläche-Kontakten. In jeder Ebene werden mehr Details über den erkannten Kontakt berücksichtigt. Abhängig von der erwarteten Bewegung und Form der Bauteile können Benutzer einen Kontakttyp auswählen, der eine schnellere Lösung ermöglicht als die automatische Einstellung. Zusammenfassung der Kontakttypen:
- Punkt zu Punkt: Nur die Knoten können einander berühren. Andernfalls kann ein Knoten auf einem Körper die Fläche des anderen Körpers durchdringen.
- Punkt zu Oberfläche: Die Knoten des sekundären Bauteils können die Fläche des primären Bauteils berühren. Die Knoten des primären Bauteils können jedoch die Fläche des sekundären Bauteils durchdringen. (Sie können sich das als einseitige Kontakterkennung vorstellen.)
- Oberfläche zu Oberfläche: Die Knoten des sekundären Bauteils können die Fläche des primären Bauteils berühren, und die Knoten des primären Bauteils können die Fläche des sekundären Bauteils berühren. Diese Option ist somit die vollständigste Kontakterkennungsebene, aber sie erfordert mehr Berechnungen.
Bei der Berechnung der Kontaktparameter wird eine relativ kleine Verformung angenommen (mit Ausnahme der anpassungsfähigen Kontaktsteifheit und Aktualisierung der Kontaktgruppe). Wenn Kontaktflächen großen Verschiebungen oder Verformungen ausgesetzt sind, z. B. mehr als 50 % Dehnung nur im örtlich begrenzten Bereich, sind grundlegende Annahmen, die bei der Berechnung von Kontaktparametern (Haupt- und Zielflächen, Kontakttyp und Kontaktausdehnungsbereich) verwenden werden, möglicherweise nicht mehr gültig. Die Benutzer müssen die verschobene Form möglicherweise im Voraus berücksichtigen und anschließend die Parameter auswählen.
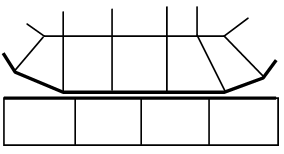
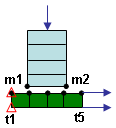
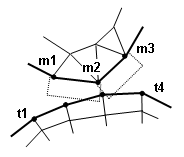
In Abbildung 2 ist eine Situation dargestellt, in der die automatische Einstellung möglicherweise zu einem Fehler führt. In Anbetracht der ursprünglichen Geometrie ist der Punkt-zu-Oberfläche-Kontakt eine gute Wahl, da die Segmente der Hauptfläche (erstes Bauteil/erste Fläche) viel größer als die Segmente der Zielfläche (sekundäres Bauteil/sekundäre Fläche) sind. Nach der Verformung des Zielbauteils sind die Segmente des Zielbauteils jedoch größer als die Segmente des Hauptbauteils. Dies führt zu einer Situation, in der das Segment m1-m2 keine Zielknoten erkennt. Die Folge sind Kontaktverlust und Durchdringung der Zielfläche. In diesem Fall wird Fläche-Fläche-Kontakt dringend empfohlen.
Weitere Informationen finden Sie auf der Seite Optionen.
|
| (a) Basierend auf der ursprünglichen Geometrie ist der Punkt-zu-Oberfläche-Kontakttyp akzeptabel (Punkte sind Zielknoten, t1-t5 berühren die Fläche der Hauptknoten, m1-m2). |
|
| (b) Nach der Verformung berühren keine Knoten der Zielfläche (t1-t5) die Hauptfläche (m1-m2). Der Fläche-Fläche-Kontakttyp ist aufgrund der Verformung erforderlich. |
| Abbildung 2: Fehler bei der automatischen Auswahl des Kontakttyps aufgrund der großen Verformung |
Ausdehnen der Kontaktseiten
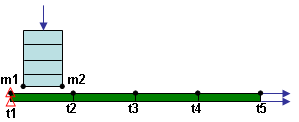
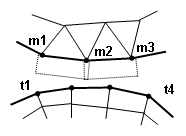
In Bezug auf die Ausdehnung der Kontaktfläche ergibt die automatische Einstellung zur Berechnung der ausgedehnten Kontaktflächen bei einer Ausgangsfläche, die flach ist oder eine geringe Krümmung aufweist, eine geringe Ausdehnung. Bei einer Verformung des Bauteils können sich Kontaktflächen öffnen, die einen leeren Bereich oder ein Loch im Kontaktbereich zurücklassen, in dem der Kontakt mit dem Zielknoten nicht erkannt wird. Siehe Abbildung 3.
|
| (a) Basierend auf der ursprünglichen Geometrie ist die Ausdehnung der Kontaktelementseiten auf einen Wert der Hauptfläche (m1-m2-m3) festgelegt. (Die Kontaktfläche ist durch gestrichelte Linien dargestellt.) |
|
| (b) Nach der Verformung der Hauptfläche (m1-m2-m3) in eine scharfe Krümmung ist der Wert unter Kontaktelementseiten ausdehnen zu klein, um zu verhindern, dass ein Knoten der Zielfläche (t3) im leeren Bereich zwischen Kontaktseiten stecken bleibt. |
| Abbildung 3: Automatische Auswahl der ausgedehnten Kontaktseiten aufgrund der großen Verformung |
Wenn eine Kontaktfläche viele scharfe Kanten und große Gleitbewegungen aufweist, spielt der Wert unter Kontaktelementseiten ausdehnen eine sehr wichtige Rolle bei der Konvergenz. Weitere Informationen finden Sie im Abschnitt zur Registerkarte Geometrie auf der Seite Erweiterte Steuerungen.