FootPlatform est la cible CI des pieds. Son mouvement est essentiel pour l'animation des jambes.
-
Editeur CATMotion >
 Groupe de fonctions Hiérarchie > Développez la hiérarchie Groupe de moyeux à laquelle FootPlatform appartient. > Cliquez sur le contrôleur à modifier.
Groupe de fonctions Hiérarchie > Développez la hiérarchie Groupe de moyeux à laquelle FootPlatform appartient. > Cliquez sur le contrôleur à modifier.
PosPivotBourrelet
FootPlatform d'une ossature CAT comprend une position de pivot animée garantissant que le pied pivote toujours autour du point approprié. Le contrôleur PosPivotBourrelet détermine la position du pivot sur l'axe X de FootPlatform (ou d'un côté à l'autre).
Une valeur de 1,0 représente l'extérieur du pied et une valeur de 0,0 correspond à l'intérieur de la plate-forme du pied.
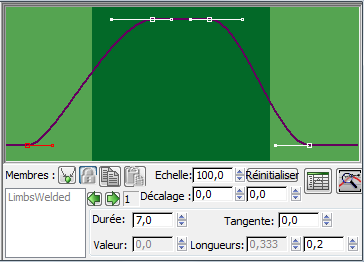
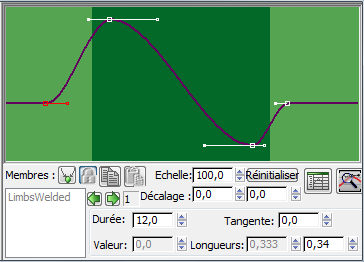
Roulis
Le contrôleur de rotation définit l'angle de rotation de FootPlatform sur sa longueur.
Dans l'illustration suivante, le roulis commence avant que le pied ne quitte le sol et se termine au moment où il se pose sur le sol. Il s'agit d'un scénario classique.
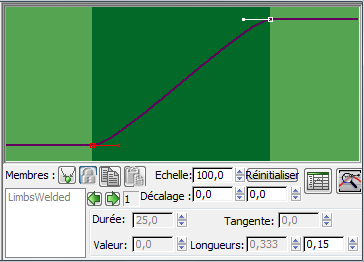
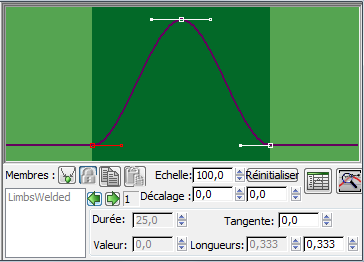
PosPivotPente
FootPlatform possède un pivot animé de position pour vous assurer que le pied pivote toujours autour du point souhaité. Le PosPivotPente détermine la position du pivot le long de l'axe Y de FootPlatform, c'est-à-dire sur sa longueur.
Une valeur de zéro positionne le pivot sur le talon de la plate-forme du pied. Une valeur de 1,0 le positionne au niveau de l'orteil.
Pour un humain, ce paramètre s'anime généralement entre l'orteil (1,0) pour l'élévation et le talon (0,0) pour la station, comme le montre l'illustration suivante.
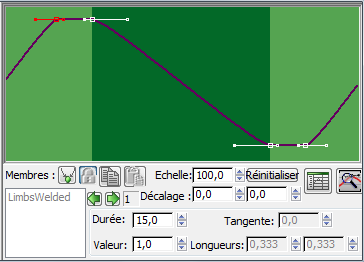
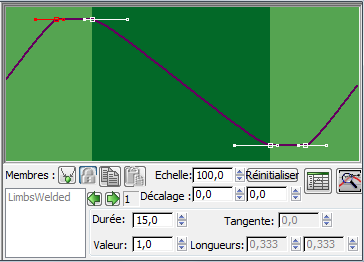
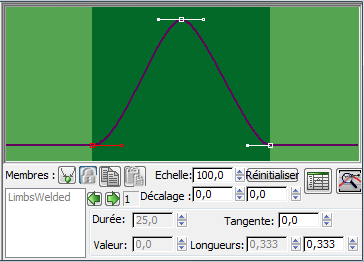
Pente
Comme avec le contrôleur Pente standard, Pente FootPlatform détermine l'angle de FootPlatform sur sa longueur (axe Y). Il est utilisé pour contrôler l'angle du pied lorsqu'il se soulève et se rabat, comme indiqué dans l'illustration suivante.
PousséePied
PousséePied est un décalage de position cyclique le long de l'axe Y. Il vous permet de lancer FootPlatform vers l'avant pendant le cycle de marche.
Ecart
Le contrôleur Ecart est identique au contrôleur ChangPoids. Il contrôle le cycle de position d'un côté à un autre (axe X) de la FootPlatform.
FormePas
Le contrôleur FormePas détermine la vitesse de la FootPlatform pendant son déplacement en l'air. En d'autres termes, il contrôle l'ajustement intérieur et extérieur du mouvement de la FootPlatform.