CATMotion intègre également le système de redirection de CAT, qui présente deux avantages par rapport au mode CI standard : la redirection élimine le problème de décrochement de l'articulation du genou causé par une extension trop importante de la chaîne CI ; de plus, dans la mesure où la jambe pousse le bassin vers le haut, le personnage présente automatiquement un "poids".
Du fait que la redirection permette d'utiliser des jambes totalement droites, vous pouvez l'utiliser pour obtenir une marche qui serait difficile voire impossible à créer à l'aide de CI.
Dans CATMotion, la redirection est déterminée par la combinaison de deux contrôleurs : AngleGenou et PoidsJambe.
AngleGenou
Le cycle de marche est divisé en quatre angles de genou. Le contrôle de l'angle du genou est accessible dans le contrôleur AngleGenou, sous Jambes dans l'Editeur CATMotion.
Pour plus de clarté, nous appellerons les quatre angles du genou Elévation, Elévation intermédiaire, Station et Station intermédiaire.
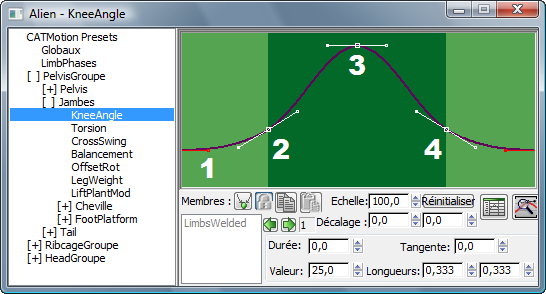
1. Station intermédiaire
2. Elévation
3. Elévation intermédiaire
4. Station
- Station intermédiaire
-
L'angle du genou entre la Station et L'Elévation.
- Elévation
-
L'angle du genou au moment où le pied est sur le point de quitter le sol.
- Elévation intermédiaire
-
L'angle du genou au milieu de sa trajectoire dans l'air.
- Station
-
L'angle du genou lorsque le pied revient au sol.
PoidsJambe
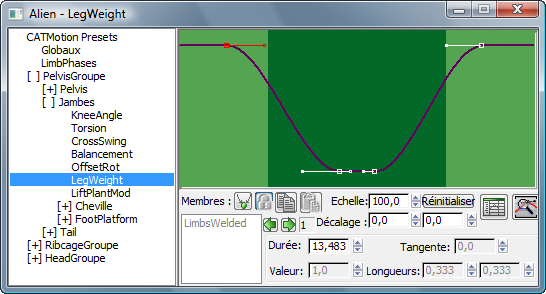
L'autre contrôleur essentiel à la redirection est appelé PoidsJambe. Il se trouve avec AngleGenou, sous Jambes, dans l'Editeur CATMotion.
Le graphique PoidsJambe contrôle la façon dont la plate-forme de pied est tirée vers le plan du sol. Lorsque PoidsJambe a une valeur de 0, l'augmentation de l'angle du genou a pour effet de soulever le pied davantage. Lorsque PoidsJambe a une valeur de 1,0, l'augmentation de l'angle du genou a pour effet de tirer le bassin vers le bas.
PoidsJambe peut également être considéré comme une Priorité Jambe. Le côté gauche du graphique est la Priorité Elévation, et le côté droit est la Priorité Station. Ces points sont essentiels lorsque vous tentez de déplacer les angles au-delà de ce qui est physiquement réalisable. Ensuite, en ajustant simplement les poids des jambes de sorte que l'un soit d'une certaine valeur et l'autre zéro, vous pouvez contrôler l'emplacement maximal de l'erreur. En général, la jambe au sol doit obtenir la priorité.
Les erreurs du système sont absorbées par les chevilles. Si vous remarquez que les chevilles sont tendues ou se comportent bizarrement, essayez de régler PoidsJambe ou AngleGenou.
En général, la première solution consiste à réduire la longueur d'enjambée maximale ou d'augmenter/de diminuer différents angles de genou.
Si le mouvement semble un peu bancal, il se peut que le graphique PoidsJambe nécessite un lissage. Si les chevilles sont trop droites lorsque le pied se soulève, il se peut que le PoidsJambe de la partie élévation du graphique soit trop long.
Course et redirection
Bien que la Redirection soit utile pour la marche, cette solution n'est pas idéale pour la course. A ce stade, il est presque impossible d'obtenir une fusion utile entre le moment où les poids des jambes se relâchent et celui où " l'envolée " prend le relais.
Pour l'instant, nous vous recommandons d'utiliser CI pour la course et le saut.