コンタクト タイプ
HumanIK には、コンタクト タイプと呼ばれる、キャラクタの足と手のフロア コンタクトを管理する 4 つの異なるモードがあります。選択するコンタクト タイプによって、一連の補助プロパティで指定する計測値を使用して HumanIK がキャラクタの足または手のアウトラインをビルドする方法が決まります。
次に、これらの使用可能なコンタクト タイプ、および各コンタクト タイプによる補助プロパティの解釈方法について説明します。コンタクト タイプのセットアップの詳細は、「足および手のコンタクトを設定する」を参照してください。
コンタクト プロパティの値を選択する
組織内で Autodesk MotionBuilder へのアクセス権を持っている場合は、ユーザまたはアーティストが Autodesk MotionBuilder を使用して次のセクションで説明するプロパティの最適な値を決定することを強くお勧めします。MotionBuilder ではビューポート内にマーカーの位置をレンダリングすることができるため、フロア コンタクト ソルバによって認識されたとおりに足と手の寸法を簡単に視覚化できます。さらに、HumanIK のフロア コンタクト エンジンを MotionBuilder のビューポート内で直接試し、設定の結果をテストし、行った調整結果の視覚的なフィードバックを即座に得ることができます。これにより、最適な値を決定するプロセスが格段に高速化され、簡単になります。
通常のコンタクト タイプ
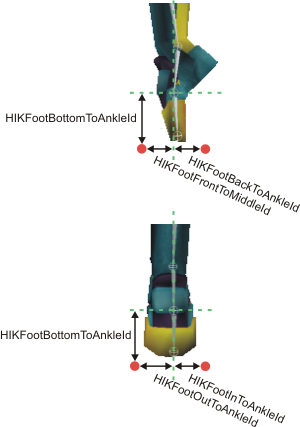
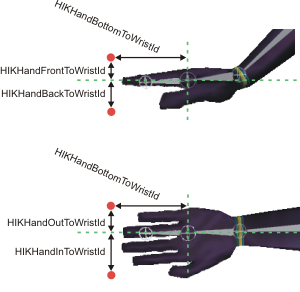
通常のコンタクト タイプでは、キャラクタの足と手は、次の図に赤で示す 6 つのマーカーによって定義されます。これらのマーカーの位置は、キャラクタの足首または手首のジョイントに対して相対的に指定します(LeftAnkleNodeId、RightAnkleNodeId、LeftWristNodeId、RightWristNodeId の各ノード)。

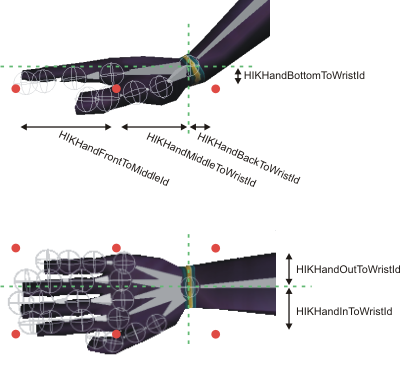
これらのマーカーは 2 つのプレーンを定義します。1 つは足の裏または手のひらで、もう 1 つは足指または指です。これらのプレーンは足指または指の根本がヒンジとなり(上の図の中央のマーカーの位置)、必要に応じて HumanIK が足を曲げられるようにします。最適な結果のためには、キャラクタの足指または指の根本のすぐ下に、このヒンジを配置します。これは足または手が曲がる位置です。HumanIK によってコントロールされる、個別に回転可能な指と足指がキャラクタにある場合は、足指および指のコンタクトのセットアップも検討する必要があります。下記「足および手のコンタクトを設定する」を参照してください。
足首または手首のコンタクト タイプ
足首または手首のコンタクト タイプでは、キャラクタの足と手は、次の図に赤で示す 4 つのマーカーによって定義されます。これらのマーカーの位置は、キャラクタの足首または手首のジョイントに対して相対的に指定します(LeftAnkleNodeId、RightAnkleNodeId、LeftWristNodeId、RightWristNodeId の各ノード)。
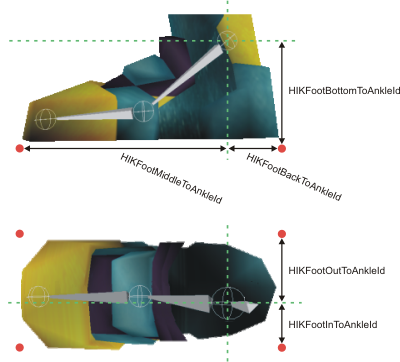
これらのマーカーは、足または手全体を表す単一のプレーンを定義します。任意のマーカーがプレーンに当たる場合、足または手は足首/手首以外の場所で曲がらず、水かきのような単一のオブジェクトとして扱われます。この手法は、HumanIK によってコントロールされる内側足(In-Foot)や内側手(In-Hand)のジョイントがないキャラクタと、HumanIK によってコントロールされる個別に回転可能な指と足指のないキャラクタに最適です。
足指のベースまたは指のベース コンタクト タイプ
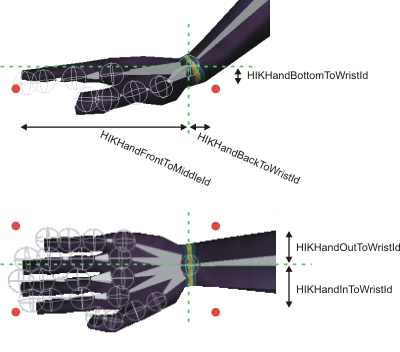
足指のベースまたは指のベース コンタクト タイプでは、次の図に赤で示すように、各キャラクタの足と手が 4 つのマーカーによって定義されます。これらのマーカーの位置は、キャラクタの足または手のジョイントに対して相対的に指定します(LeftFootNodeId、RightFootNodeId、LeftHandNodeId、RightHandNodeId の各ノード)。

これらのマーカーは、キャラクタの内側足(In-Foot)ジョイントまたは内側手(In-Hand)ジョイントの前面で、足または手のフロント部分を表す単一のプレーンを定義します。ただし、この手法では、キャラクタの手首または足はプレーンを通り抜けます。そのため、この手法が最適なのは、つま先で歩行するキャラクタや、後足の前部のみが地面と接する犬などの四足動物の後足です。
HumanIK によってコントロールされる足または手のジョイントがキャラクタにない場合、マーカーの位置は足首と手首のジョイントに対して相対的に決定され(LeftAnkleNodeId、RightAnkleNodeId、LeftWristNodeId、RightWristNodeId の各ノード)、この手法は機能的に上記の足首/手首のコンタクト タイプと同等になります。
蹄のコンタクト タイプ
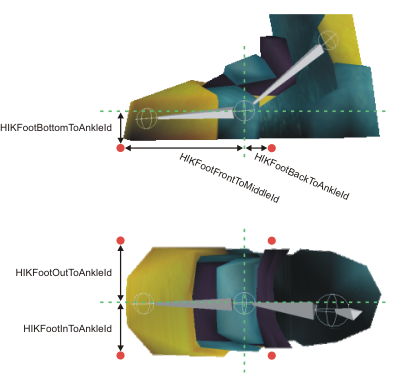
蹄のコンタクト タイプでは、キャラクタの足と手は、次の図に赤で示す 4 つのマーカーによって定義されます。これらのマーカーの位置は、キャラクタの足または手のジョイントに対して相対的に指定します(LeftFootNodeId、RightFootNodeId、LeftHandNodeId、RightHandNodeId の各ノード)。
これらのマーカーは、足または手の端を表す単一のプレーンを定義します。この手法が最適なのは、足の最後のボーンがおおよそ地面に対して垂直であるキャラクタです。たとえば、蹄のある動物や、アン ポワント(上記の図に示すようにつま先立ち)で踊るバレリーナなどです。通常、これらのキャラクタには、HumanIK でコントロールされる個別に回転可能な指または足指はありません。
このコンタクト タイプのいずれかのマーカーが地面に触れるときに、HumanIK は他のマーカーも地面に触れるようにするため、足首や手首、または足や手のジョイントの回転を試みます。この動作により、蹄のあるキャラクタの足の動きにリアリティが増します。
HumanIK によってコントロールされている足または手のジョイントがキャラクタにない場合、マーカーの位置は、足首と手首のジョイントに対して相対的に決定されます(LeftAnkleNodeId、RightAnkleNodeId、LeftWristNodeId、RightWristNodeId の各ノード)。
 特に明記されている場合以外は、この作業は、Creative Commons 表示 - 非営利 - 継承 3.0 非移植ライセンス のもと認可を受けています。 Autodesk Creative Commons FAQ (英語版) を参照してください。
特に明記されている場合以外は、この作業は、Creative Commons 表示 - 非営利 - 継承 3.0 非移植ライセンス のもと認可を受けています。 Autodesk Creative Commons FAQ (英語版) を参照してください。