全般プロパティ
このページに示すキャラクタ プロパティにより、HumanIK インバース キネマティクスおよびリターゲット ソルバの全般的な操作が設定されます。
[固さ]
次のプロパティを使用すると、キャラクタのスケルトンの選択したパーツの固さをコントロールできます。
HIKCtrlSpineStiffnessId
HumanIK が多くの脊椎ノードを使用してキャラクタを曲げる場合、通常、各ノードは IK ソリューション全体に影響を与えるときに自由に曲がり、キャラクタが非常に柔軟であるように表示します。このプロパティにより、脊椎のその他のボーンから基本の脊椎ノードに回転をシフトすることができます。これにより、脊椎は固く見えます。
より高い値を設定すると、基本の脊椎ノードに向かって回転は次第ににシフトします。値 1.0 を指定すると、基本の脊椎ノードのみが回転し、他の脊椎ノードは基本の脊椎ノードに対して固定されます。より低い値を設定すると、回転はすべての脊椎ノードに対してより均一になります。値 0.0 は、すべての脊椎ノードに対して均等な回転を適用します。
HIKCtrlNeckStiffnessId
HIKCollarStiffnessX
X 軸を中心に回転するときに、キャラクタの鎖骨ノード(LeftCollarNodeId、RightCollarNodeId、LeftCollarExtraNodeId、RightCollarExtraNodeId の各ノード)の柔軟性をコントロールします。
より高い値を設定すると鎖骨は固くなり、X 軸を中心に回転する可能性が低くなります。より低い値を設定すると鎖骨は柔軟になり、X 軸を中心に回転する可能性が高くなります。
HIKCollarStiffnessY
Y 軸を中心に回転するときに、キャラクタの鎖骨ノード(LeftCollarNodeId、RightCollarNodeId、LeftCollarExtraNodeId、RightCollarExtraNodeId の各ノード)の柔軟性をコントロールします。
より高い値を設定すると鎖骨は固くなり、Y 軸を中心に回転する可能性が低くなります。より低い値を設定すると鎖骨は柔軟になり、Y 軸を中心に回転する可能性が高くなります。
HIKCollarStiffnessZ
Z 軸を中心に回転するときに、キャラクタの鎖骨ノード(LeftCollarNodeId、RightCollarNodeId、LeftCollarExtraNodeId、RightCollarExtraNodeId の各ノード)の柔軟性をコントロールします。
より高い値を設定すると鎖骨は固くなり、Z 軸を中心に回転する可能性が低くなります。より低い値を設定すると鎖骨は柔軟になり、Z 軸を中心に回転する可能性が高くなります。
膝と肘
次のプロパティは、キャラクタの肘と膝が曲がる方法と回転する方法をコントロールします。
HIKLeftElbowKillPitchId
インバース キネマティクス ソルバでピッチ軸を中心にした左肘の回転を禁止し、不自然な方法で横に曲がらないようにするかどうかを決定します。
このプロパティを無効にすると、通常、インバース キネマティクス ソルバは、キャラクタに対して生成するポーズで肘のピッチ回転を防止します。ただし、特定の場合にピッチ回転が許可されることがあります。たとえば、左肘のエフェクタに Reach Rotation およびピッチ回転を直接割り当てる場合です。
このプロパティを有効にすると、15 度を超えるすべてのピッチ回転が禁止されます。エフェクタに直接ピッチ回転を割り当てようとしても同様です。この場合は、上腕ポイントを要求された向きにするため、その代わりに肩が最大 90 度回転します。
HIKRightElbowKillPitchId
インバース キネマティクス ソルバでピッチ軸を中心にした右肘の回転を禁止し、不自然な方法で横に曲がらないようにするかどうかを決定します。
このプロパティを無効にすると、通常、インバース キネマティクス ソルバは、キャラクタに対して生成するポーズで肘のピッチ回転を防止します。ただし、特定の場合にピッチ回転が許可されることがあります。たとえば、右肘のエフェクタに Reach Rotation およびピッチ回転を直接割り当てる場合です。
このプロパティを有効にすると、15 度を超えるすべてのピッチ回転が禁止されます。エフェクタに直接ピッチ回転を割り当てようとしても同様です。この場合は、上腕ポイントを要求された向きにするため、その代わりに肩が最大 90 度回転します。
HIKLeftKneeKillPitchId
インバース キネマティクス ソルバでピッチ軸を中心にした左膝の回転を禁止し、不自然な方法で横に曲がらないようにするかどうかを決定します。
このプロパティを無効にすると、通常、インバース キネマティクス ソルバは、キャラクタに対して生成するポーズで膝のピッチ回転を防止します。ただし、特定の場合にピッチ回転が許可されることがあります。たとえば、左膝のエフェクタに Reach Rotation およびピッチ回転を直接割り当てる場合です。
このプロパティを有効にすると、15 度を超えるすべてのピッチ回転が禁止されます。エフェクタに直接ピッチ回転を割り当てようとしても同様です。この場合は、下腿ポイントを要求された向きにするため、その代わりにヒップが最大 90 度回転します。
HIKRightKneeKillPitchId
インバース キネマティクス ソルバでピッチ軸を中心にした右膝の回転を禁止し、不自然な方法で横に曲がらないようにするかどうかを決定します。
このプロパティを無効にすると、通常、インバース キネマティクス ソルバは、キャラクタに対して生成するポーズで膝のピッチ回転を防止します。ただし、特定の場合にピッチ回転が許可されることがあります。たとえば、右膝のエフェクタに Reach Rotation およびピッチ回転を直接割り当てる場合です。
このプロパティを有効にすると、15 度を超えるすべてのピッチ回転が禁止されます。エフェクタに直接ピッチ回転を割り当てようとしても同様です。この場合は、下腿ポイントを要求された向きにするため、その代わりにヒップが最大 90 度回転します。
HIKRealisticLeftKneeSolvingId
このパラメータは、左膝が回転するときに左膝が足の向きに沿って動くようにするため、左のヒップが回転する度合いを決定します。
デフォルト値の 0.0 を指定すると、足首は膝とは完全に別個に回転します。足は、膝の位置または向きを制限することなく任意の方向を向くことができ、これにより不自然な位置となる可能性があります。たとえば、左足は右足に向けて内側に 90 度の方向を向いているのに、左膝は真っすぐ前を向いたままとなる場合があります。
この値のパラメータの値を大きくすると、足首の回転比率がヒップに適用され、膝が足の向きにより一致します。このパラメータの値を最大値に設定すると、足首が回転するときに、膝が足の向きと完全に一致するようになります。
HIKRealisticRightKneeSolvingId
このパラメータは、右膝が回転するときに右膝が足の向きに沿って動くようにするため、右のヒップが回転する度合いを決定します。
デフォルト値の 0.0 を指定すると、足首は膝とは完全に別個に回転します。足は、膝の位置または向きを制限することなく任意の方向を向くことができ、これにより不自然な位置となる可能性があります。たとえば、右足は左足に向けて内側に 90 度の方向を向いているのに、右膝は真っすぐ前を向いたままとなる場合があります。
この値のパラメータの値を大きくすると、足首の回転比率がヒップに適用され、膝が足の向きにより一致します。このパラメータの値を最大値に設定すると、足首が回転するときに、膝が足の向きと完全に一致するようになります。
ロールの抽出と伝達
次のプロパティは、キャラクタの手と足に適用されるときに、HumanIK がロール回転(関連するボーンに平行な軸を中心とした回転)を扱う方法をコントロールします。詳細は、「キャラクタ プロパティ」を参照してください。
HIKRollExtractionMode
HumanIK インバース キネマティクス ソルバがノードから関連するロール ノード(たとえば、LeftElbowNodeId ノードから LeftElbowRollNodeId ノード)にロール回転を適用するために使用するメソッドを決定します。
HIKLeftUpLegRollId
ロール軸を中心とした LeftHipNodeId の回転が抽出され、ジョイント チェーンの下の次のノードに適用されるかどうかを決定します。回転は、キャラクタライズされた場合は LeftHipRollNodeId に適用され、キャラクタライズされていない場合は LeftKneeNodeId に適用されます。
このプロパティがオンの場合、その値により、元のノードから抽出される元のロール回転の比率が決定され、代わりにその子ノードに適用されます。
1.0 を指定すると、すべてのロールが元のノードから子に転送されます。
0.5 を指定すると、ロールは元のノードと子の間で均等に分散されます。
0.0 を指定すると、いずれのロールも子に転送されず、元のノードのみが移動します。
| モード タイプ: |
HIKPropertyOffOn |
| 受け入れられるモード: |
0: LeftHipNodeId 上のすべてのロール回転は、子ノードではなく、常にそのノードに適用されます。 1: LeftHipNodeId に適用されるロール回転の比率が抽出され、代わりにその子ノードに適用されます。この比率は、このプロパティの値によって設定されます。 |
| デフォルトのモード: |
0 |
| ユニットのタイプ: |
パーセント |
| 受け入れられる値: |
0.0 ~ 1.0 |
| デフォルト値: |
0.6 |
HIKLeftUpLegRollExId
ロール軸を中心とした LeftHipRollNodeId の回転が抽出され、その子ノード LeftKneeNodeId に適用されるかどうかを決定します。このプロパティの値により、ロール ノードから抽出され、代わりに子ノードに適用される元のロール回転の比率が決定されます。
0.0 では、いずれのロールも子に転送されず、ロール ノードのみが移動します。
0.5 では、ロールはロール ノードと子の間で均等に分散されます。
1.0 では、すべてのロールがロール ノードから子に転送されます。
1.0 よりも大きい値を設定すると、回転が過大に抽出されます。親ノードからの最初の適用よりも多くの回転がロール ノードから抽出されます。これにより、ロール ノードは親ノードの反対方向に回転します。次に、ロール ノードから抽出されるすべての回転が、親ノードの元の回転方向の子ノードに適用されます。たとえば、90 度のロール回転が適用されたロール ノード(親から抽出)があり、ロール ノードに対してこの値を 1.5 に設定するとします。ロール ノードは 135 度(1.5 * 90)逆に回転し、反対方向に 45 度の明確な回転となります。次に、ロール ノードの子はロール ノードの新しい回転に対して相対的に 135 度回転し、ロール ノードの元の回転が表示されます。
HIKLeftLegRollId
ロール軸を中心とした LeftKneeNodeId の回転が抽出され、ジョイント チェーンの下の次のノードに適用されるかどうかを決定します。回転は、キャラクタライズされた場合は LeftKneeRollNodeId に適用され、キャラクタライズされていない場合は LeftAnkleNodeId に適用されます。
このプロパティがオンの場合、その値により、元のノードから抽出される元のロール回転の比率が決定され、代わりにその子ノードに適用されます。
1.0 を指定すると、すべてのロールが元のノードから子に転送されます。
0.5 を指定すると、ロールは元のノードと子の間で均等に分散されます。
0.0 を指定すると、いずれのロールも子に転送されず、元のノードのみが移動します。
| モード タイプ: |
HIKPropertyOffOn |
| 受け入れられるモード: |
0: LeftKneeNodeId 上のすべてのロール回転は、子ノードではなく、常にそのノードに適用されます。 1: LeftKneeNodeId に適用されるロール回転の比率が抽出され、代わりにその子ノードに適用されます。この比率は、このプロパティの値によって設定されます。 |
| デフォルトのモード: |
0 |
| ユニットのタイプ: |
パーセント |
| 受け入れられる値: |
0.0 ~ 1.0 |
| デフォルト値: |
0.6 |
HIKLeftKneeRollExId
ロール軸を中心とした LeftKneeRollNodeId の回転が抽出され、その子ノード LeftAnkleNodeId に適用されるかどうかを決定します。このプロパティの値により、ロール ノードから抽出され、代わりに子ノードに適用される元のロール回転の比率が決定されます。
0.0 では、いずれのロールも子に転送されず、ロール ノードのみが移動します。
0.5 では、ロールはロール ノードと子の間で均等に分散されます。
1.0 では、すべてのロールがロール ノードから子に転送されます。
1.0 よりも大きい値を設定すると、回転が過大に抽出されます。親ノードからの最初の適用よりも多くの回転がロール ノードから抽出されます。これにより、ロール ノードは親ノードの反対方向に回転します。次に、ロール ノードから抽出されるすべての回転が、親ノードの元の回転方向の子ノードに適用されます。たとえば、90 度のロール回転が適用されたロール ノード(親から抽出)があり、ロール ノードに対してこの値を 1.5 に設定するとします。ロール ノードは 135 度(1.5 * 90)逆に回転し、反対方向に 45 度の明確な回転となります。次に、ロール ノードの子はロール ノードの新しい回転に対して相対的に 135 度回転し、ロール ノードの元の回転が表示されます。
HIKRightUpLegRollId
ロール軸を中心とした RightHipNodeId の回転が抽出され、ジョイント チェーンの下の次のノードに適用されるかどうかを決定します。回転は、キャラクタライズされた場合は RightHipRollNodeId に適用され、キャラクタライズされていない場合は RightKneeNodeId に適用されます。
このプロパティがオンの場合、その値により、元のノードから抽出される元のロール回転の比率が決定され、代わりにその子ノードに適用されます。
1.0 を指定すると、すべてのロールが元のノードから子に転送されます。
0.5 を指定すると、ロールは元のノードと子の間で均等に分散されます。
0.0 を指定すると、いずれのロールも子に転送されず、元のノードのみが移動します。
| モード タイプ: |
HIKPropertyOffOn |
| 受け入れられるモード: |
0: RightHipNodeId 上のすべてのロール回転は、子ノードではなく、常にそのノードに適用されます。 1: RightHipNodeId に適用されるロール回転の比率が抽出され、代わりにその子ノードに適用されます。この比率は、このプロパティの値によって設定されます。 |
| デフォルトのモード: |
0 |
| ユニットのタイプ: |
パーセント |
| 受け入れられる値: |
0.0 ~ 1.0 |
| デフォルト値: |
0.6 |
HIKRightHipRollExId
ロール軸を中心とした RightHipRollNodeId の回転が抽出され、その子ノード RightKneeNodeId に適用されるかどうかを決定します。このプロパティの値により、ロール ノードから抽出され、代わりに子ノードに適用される元のロール回転の比率が決定されます。
0.0 では、いずれのロールも子に転送されず、ロール ノードのみが移動します。
0.5 では、ロールはロール ノードと子の間で均等に分散されます。
1.0 では、すべてのロールがロール ノードから子に転送されます。
1.0 よりも大きい値を設定すると、回転が過大に抽出されます。親ノードからの最初の適用よりも多くの回転がロール ノードから抽出されます。これにより、ロール ノードは親ノードの反対方向に回転します。次に、ロール ノードから抽出されるすべての回転が、親ノードの元の回転方向の子ノードに適用されます。たとえば、90 度のロール回転が適用されたロール ノード(親から抽出)があり、ロール ノードに対してこの値を 1.5 に設定するとします。ロール ノードは 135 度(1.5 * 90)逆に回転し、反対方向に 45 度の明確な回転となります。次に、ロール ノードの子はロール ノードの新しい回転に対して相対的に 135 度回転し、ロール ノードの元の回転が表示されます。
HIKRightLegRollId
ロール軸を中心とした RightKneeNodeId の回転が抽出され、ジョイント チェーンの下の次のノードに適用されるかどうかを決定します。回転は、キャラクタライズされた場合は RightKneeRollNodeId に適用され、キャラクタライズされていない場合は RightAnkleNodeId に適用されます。
このプロパティがオンの場合、その値により、元のノードから抽出される元のロール回転の比率が決定され、代わりにその子ノードに適用されます。
1.0 を指定すると、すべてのロールが元のノードから子に転送されます。
0.5 を指定すると、ロールは元のノードと子の間で均等に分散されます。
0.0 を指定すると、いずれのロールも子に転送されず、元のノードのみが移動します。
| モード タイプ: |
HIKPropertyOffOn |
| 受け入れられるモード: |
0: RightKneeNodeId 上のすべてのロール回転は、子ノードではなく、常にそのノードに適用されます。 1: RightKneeNodeId に適用されるロール回転の比率が抽出され、代わりにその子ノードに適用されます。この比率は、このプロパティの値によって設定されます。 |
| デフォルトのモード: |
0 |
| ユニットのタイプ: |
パーセント |
| 受け入れられる値: |
0.0 ~ 1.0 |
| デフォルト値: |
0.6 |
HIKRightKneeRollExId
ロール軸を中心とした RightKnee RollNodeId の回転が抽出され、その子ノード RightAnkle NodeId に適用されるかどうかを決定します。このプロパティの値により、ロール ノードから抽出され、代わりに子ノードに適用される元のロール回転の比率が決定されます。
0.0 では、いずれのロールも子に転送されず、ロール ノードのみが移動します。
0.5 では、ロールはロール ノードと子の間で均等に分散されます。
1.0 では、すべてのロールがロール ノードから子に転送されます。
1.0 よりも大きい値を設定すると、回転が過大に抽出されます。親ノードからの最初の適用よりも多くの回転がロール ノードから抽出されます。これにより、ロール ノードは親ノードの反対方向に回転します。次に、ロール ノードから抽出されるすべての回転が、親ノードの元の回転方向の子ノードに適用されます。たとえば、90 度のロール回転が適用されたロール ノード(親から抽出)があり、ロール ノードに対してこの値を 1.5 に設定するとします。ロール ノードは 135 度(1.5 * 90)逆に回転し、反対方向に 45 度の明確な回転となります。次に、ロール ノードの子はロール ノードの新しい回転に対して相対的に 135 度回転し、ロール ノードの元の回転が表示されます。
HIKLeftArmRollId
ロール軸を中心とした LeftShoulderNodeId の回転が抽出され、ジョイント チェーンの下の次のノードに適用されるかどうかを決定します。回転は、キャラクタライズされた場合は LeftShoulderRollNodeId に適用され、キャラクタライズされていない場合は LeftElbowNodeId に適用されます。
このプロパティがオンの場合、その値により、元のノードから抽出される元のロール回転の比率が決定され、代わりにその子ノードに適用されます。
1.0 を指定すると、すべてのロールが元のノードから子に転送されます。
0.5 を指定すると、ロールは元のノードと子の間で均等に分散されます。
0.0 を指定すると、いずれのロールも子に転送されず、元のノードのみが移動します。
| モード タイプ: |
HIKPropertyOffOn |
| 受け入れられるモード: |
0: LeftShoulderNodeId 上のすべてのロール回転は、子ノードではなく、常にそのノードに適用されます。 1: LeftShoulderNodeId に適用されるロール回転の比率が抽出され、代わりにその子ノードに適用されます。この比率は、このプロパティの値によって設定されます。 |
| デフォルトのモード: |
0 |
| ユニットのタイプ: |
パーセント |
| 受け入れられる値: |
0.0 ~ 1.0 |
| デフォルト値: |
0.6 |
HIKLeftShoulderRollExId
ロール軸を中心とした LeftShoulderRollNodeId の回転が抽出され、その子ノード LeftElbowNodeId に適用されるかどうかを決定します。このプロパティの値により、ロール ノードから抽出され、代わりに子ノードに適用される元のロール回転の比率が決定されます。
0.0 では、いずれのロールも子に転送されず、ロール ノードのみが移動します。
0.5 では、ロールはロール ノードと子の間で均等に分散されます。
1.0 では、すべてのロールがロール ノードから子に転送されます。
1.0 よりも大きい値を設定すると、回転が過大に抽出されます。親ノードからの最初の適用よりも多くの回転がロール ノードから抽出されます。これにより、ロール ノードは親ノードの反対方向に回転します。次に、ロール ノードから抽出されるすべての回転が、親ノードの元の回転方向の子ノードに適用されます。たとえば、90 度のロール回転が適用されたロール ノード(親から抽出)があり、ロール ノードに対してこの値を 1.5 に設定するとします。ロール ノードは 135 度(1.5 * 90)逆に回転し、反対方向に 45 度の明確な回転となります。次に、ロール ノードの子はロール ノードの新しい回転に対して相対的に 135 度回転し、ロール ノードの元の回転が表示されます。
HIKLeftForeArmRollId
ロール軸を中心とした LeftElbowNodeId の回転が抽出され、ジョイント チェーンの下の次のノードに適用されるかどうかを決定します。回転は、キャラクタライズされた場合は LeftElbowRollNodeId に適用され、キャラクタライズされていない場合は LeftWristNodeId に適用されます。
このプロパティがオンの場合、その値により、元のノードから抽出される元のロール回転の比率が決定され、代わりにその子ノードに適用されます。
1.0 を指定すると、すべてのロールが元のノードから子に転送されます。
0.5 を指定すると、ロールは元のノードと子の間で均等に分散されます。
0.0 を指定すると、いずれのロールも子に転送されず、元のノードのみが移動します。
| モード タイプ: |
HIKPropertyOffOn |
| 受け入れられるモード: |
0: LeftElbowNodeId 上のすべてのロール回転は、子ノードではなく、常にそのノードに適用されます。 1: LeftElbowNodeId に適用されるロール回転の比率が抽出され、代わりにその子ノードに適用されます。この比率は、このプロパティの値によって設定されます。 |
| デフォルトのモード: |
0 |
| ユニットのタイプ: |
パーセント |
| 受け入れられる値: |
0.0 ~ 1.0 |
| デフォルト値: |
0.6 |
HIKLeftElbowRollExId
ロール軸を中心とした LeftElbowRollNodeId の回転が抽出され、その子ノード LeftWristNodeId に適用されるかどうかを決定します。このプロパティの値により、ロール ノードから抽出され、代わりに子ノードに適用される元のロール回転の比率が決定されます。
0.0 では、いずれのロールも子に転送されず、ロール ノードのみが移動します。
0.5 では、ロールはロール ノードと子の間で均等に分散されます。
1.0 では、すべてのロールがロール ノードから子に転送されます。
1.0 よりも大きい値を設定すると、回転が過大に抽出されます。親ノードからの最初の適用よりも多くの回転がロール ノードから抽出されます。これにより、ロール ノードは親ノードの反対方向に回転します。次に、ロール ノードから抽出されるすべての回転が、親ノードの元の回転方向の子ノードに適用されます。たとえば、90 度のロール回転が適用されたロール ノード(親から抽出)があり、ロール ノードに対してこの値を 1.5 に設定するとします。ロール ノードは 135 度(1.5 * 90)逆に回転し、反対方向に 45 度の明確な回転となります。次に、ロール ノードの子はロール ノードの新しい回転に対して相対的に 135 度回転し、ロール ノードの元の回転が表示されます。
HIKRightArmRollId
ロール軸を中心とした RightShoulderNodeId の回転が抽出され、ジョイント チェーンの下の次のノードに適用されるかどうかを決定します。回転は、キャラクタライズされた場合は RightShoulderRollNodeId に適用され、キャラクタライズされていない場合は RightElbowNodeId に適用されます。
このプロパティがオンの場合、その値により、元のノードから抽出される元のロール回転の比率が決定され、代わりにその子ノードに適用されます。
1.0 を指定すると、すべてのロールが元のノードから子に転送されます。
0.5 を指定すると、ロールは元のノードと子の間で均等に分散されます。
0.0 を指定すると、いずれのロールも子に転送されず、元のノードのみが移動します。
| モード タイプ: |
HIKPropertyOffOn |
| 受け入れられるモード: |
0: RightShoulderNodeId 上のすべてのロール回転は、子ノードではなく、常にそのノードに適用されます。 1: RightShoulderNodeId に適用されるロール回転の比率が抽出され、代わりにその子ノードに適用されます。この比率は、このプロパティの値によって設定されます。 |
| デフォルトのモード: |
0 |
| ユニットのタイプ: |
パーセント |
| 受け入れられる値: |
0.0 ~ 1.0 |
| デフォルト値: |
0.6 |
HIKRightShoulderRollExId
ロール軸を中心とした RightShoulderRollNodeId の回転が抽出され、その子ノード RightElbowNodeId に適用されるかどうかを決定します。このプロパティの値により、ロール ノードから抽出され、代わりに子ノードに適用される元のロール回転の比率が決定されます。
0.0 では、いずれのロールも子に転送されず、ロール ノードのみが移動します。
0.5 では、ロールはロール ノードと子の間で均等に分散されます。
1.0 では、すべてのロールがロール ノードから子に転送されます。
1.0 よりも大きい値を設定すると、回転が過大に抽出されます。親ノードからの最初の適用よりも多くの回転がロール ノードから抽出されます。これにより、ロール ノードは親ノードの反対方向に回転します。次に、ロール ノードから抽出されるすべての回転が、親ノードの元の回転方向の子ノードに適用されます。たとえば、90 度のロール回転が適用されたロール ノード(親から抽出)があり、ロール ノードに対してこの値を 1.5 に設定するとします。ロール ノードは 135 度(1.5 * 90)逆に回転し、反対方向に 45 度の明確な回転となります。次に、ロール ノードの子はロール ノードの新しい回転に対して相対的に 135 度回転し、ロール ノードの元の回転が表示されます。
HIKRightForeArmRollId
ロール軸を中心とした RightElbowNodeId の回転が抽出され、ジョイント チェーンの下の次のノードに適用されるかどうかを決定します。回転は、キャラクタライズされた場合は RightElbowRollNodeId に適用され、キャラクタライズされていない場合は RightWristNodeId に適用されます。
このプロパティがオンの場合、その値により、元のノードから抽出される元のロール回転の比率が決定され、代わりにその子ノードに適用されます。
1.0 を指定すると、すべてのロールが元のノードから子に転送されます。
0.5 を指定すると、ロールは元のノードと子の間で均等に分散されます。
0.0 を指定すると、いずれのロールも子に転送されず、元のノードのみが移動します。
| モード タイプ: |
HIKPropertyOffOn |
| 受け入れられるモード: |
0: RightElbowNodeId 上のすべてのロール回転は、子ノードではなく、常にそのノードに適用されます。 1: RightElbowNodeId に適用されるロール回転の比率が抽出され、代わりにその子ノードに適用されます。この比率は、このプロパティの値によって設定されます。 |
| デフォルトのモード: |
0 |
| ユニットのタイプ: |
パーセント |
| 受け入れられる値: |
0.0 ~ 1.0 |
| デフォルト値: |
0.6 |
HIKRightElbowRollExId
ロール軸を中心とした RightElbowRollNodeId の回転が抽出され、その子ノード RightWristNodeId に適用されるかどうかを決定します。このプロパティの値により、ロール ノードから抽出され、代わりに子ノードに適用される元のロール回転の比率が決定されます。
0.0 では、いずれのロールも子に転送されず、ロール ノードのみが移動します。
0.5 では、ロールはロール ノードと子の間で均等に分散されます。
1.0 では、すべてのロールがロール ノードから子に転送されます。
1.0 よりも大きい値を設定すると、回転が過大に抽出されます。親ノードからの最初の適用よりも多くの回転がロール ノードから抽出されます。これにより、ロール ノードは親ノードの反対方向に回転します。次に、ロール ノードから抽出されるすべての回転が、親ノードの元の回転方向の子ノードに適用されます。たとえば、90 度のロール回転が適用されたロール ノード(親から抽出)があり、ロール ノードに対してこの値を 1.5 に設定するとします。ロール ノードは 135 度(1.5 * 90)逆に回転し、反対方向に 45 度の明確な回転となります。次に、ロール ノードの子はロール ノードの新しい回転に対して相対的に 135 度回転し、ロール ノードの元の回転が表示されます。
Squash ’n’ Stretch
次のプロパティは、Squash ’n’ Stretch ソルバがキャラクタの四肢を収縮および伸長する方法をコントロールします。「Squash 'n' Stretch を使用する」を参照してください。
HIKSnSReachLeftWrist
HIKSnSReachRightWrist
HIKSnSReachLeftAnkle
HIKSnSReachRightAnkle
HIKSnSScaleArmsAndLegs
HIKSnSReachChestEnd
HIKSnSScaleSpineChildren
脊椎に適用される収縮と伸長のどれだけが、脊椎の子ノードにも適用されるかを決定します。
キャラクタライズされる場合は LeftCollarNodeId、そうでない場合は LeftShoulderNodeId
キャラクタライズされる場合は RightCollarNodeId、そうでない場合は RightShoulderNodeId
これらのノードのスケールは、HIKSnSScaleSpine プロパティが正の値に設定されていても変更されることはないことに注意してください。脊椎の子の収縮と伸長は、スケールするのではなく、常にノードの変換により実行されます。
HIKSnSScaleSpine
HIKSnSReachHead
HIKSnSScaleNeck
肩のコントロール
次のプロパティは、HumanIK がキャラクタの肩を動かす方法をコントロールします。
HIKRealisticShoulder
腕を上げたときの人間の肩の動作をシミュレートするため、肩から抽出され鎖骨のボーン(LeftCollarNodeId および RightCollarNodeId ノード)に適用される、肩(LeftShoulderNodeId および RightShoulderNodeId ノード)に適用される回転の比率を決定します。
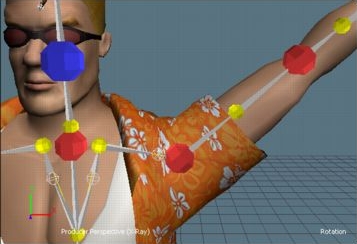
|
たとえば、左の図では、HIKRealisticShoulder プロパティを有効にせずにキャラクタが左腕を上げています。この結果、肩が不自然なポーズになります。 |
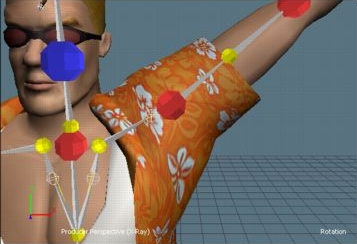
|
この図では、HIKRealisticShoulder プロパティが有効になり、値が 1.0 に設定されています。腕が回転するときに、回転の 100% が鎖骨のボーンに移動し、モデルの肩が上に動きます。 |
HIKExtraCollarRatioId
キャラクタのスケルトンに追加の鎖骨のボーン(それぞれLeftCollarExtraNodeId および RightCollarExtraNodeId ノードによって定義されます)がある場合、このプロパティは HumanIK が鎖骨のノードの間で回転と移動を拡散する方法をコントロールします。
より低い値を指定すると、基本の鎖骨ボーン側(LeftCollarNodeId および RightCollarNodeId ノード)に動きが移動し、より高い値を指定すると、追加の鎖骨ボーン側に動きが次第にに移ります。
ヒップのコントロール
次のプロパティは、HumanIK がキャラクタのヒップを動かす方法をコントロールします。
HIKHipsTranslationModeId
キャラクタに、ヒップ トランスレーションを維持するために指定された特殊なノード(HipsTranslationId ノード)がある場合、このプロパティは、キャラクタのヒップに適用された回転(LeftHipNodeId および RightHipNodeId ノード)が、特殊な移動ノードにも適用されるかどうかを決定します。
HIKCtrlEnforceGravityId
HumanIK インバース キネマティクス ソルバがキャラクタの重心であるヒップのバランスをキャラクタの足の間で維持するように試みる度合いを決定します。
より高い値を指定すると、ヒップの動きが制限され、キャラクタの足の位置の間に維持されます。より低い値を指定すると、足の位置にかかわらずヒップは任意の位置に自由に移動できます。これにより、重力が原因で、キャラクタのポーズは、現実的な人間のバランスが損なわれたものになる可能性があります。
このプロパティは、HIKCtrlResistHipsPositionId プロパティによって設定されるヒップ トランスレーションに対する Resist の値がゼロより大きい場合にのみ使用されます。
ヒップと胸のエフェクタのオフセット
次のプロパティは、キャラクタのヒップと胸のエフェクタに適用されるオフセットをコントロールします。「HumanIK ノードおよびエフェクタにジョイントをマッピングする」を参照してください。
HIKHipsTOffsetXId
デフォルトでは、HipsEffectorId は、キャラクタがデフォルトの T スタンスで立っているときに LeftHipNodeId と RightHipNodeId の位置の中間にあるスケルトン上の仮想のポイントをコントロールします。このパラメータは、X 軸に沿ってこの仮想のポイントにオフセットを適用します。
HIKHipsTOffsetYId
デフォルトでは、HipsEffectorId は、キャラクタがデフォルトの T スタンスで立っているときに LeftHipNodeId と RightHipNodeId の位置の中間にあるスケルトン上の仮想のポイントをコントロールします。このパラメータは、Y 軸に沿ってこの仮想のポイントにオフセットを適用します。
HIKHipsTOffsetZId
デフォルトでは、HipsEffectorId は、キャラクタがデフォルトの T スタンスで立っているときに LeftHipNodeId と RightHipNodeId の位置の中間にあるスケルトン上の仮想のポイントをコントロールします。このパラメータは、Z 軸に沿ってこの仮想のポイントにオフセットを適用します。
HIKChestTOffsetXId
デフォルトでは、ChestEndEffectorId は、キャラクタがデフォルトの T スタンスで立っているときに LeftShoulderNodeId と RightShoulderNodeId の位置の中間にあるスケルトン上の仮想のポイントをコントロールします。このパラメータは、X 軸に沿ってこの仮想のポイントにオフセットを適用します。
リターゲット時に、このオフセットは、HIKReachActorChestId プロパティがターゲット キャラクタに対してゼロ以外の値に設定されたときにのみ使用されます。
HIKChestTOffsetYId
デフォルトでは、ChestEndEffectorId は、キャラクタがデフォルトの T スタンスで立っているときに LeftShoulderNodeId と RightShoulderNodeId の位置の中間にあるスケルトン上の仮想のポイントをコントロールします。このパラメータは、Y 軸に沿ってこの仮想のポイントにオフセットを適用します。
リターゲット時に、このオフセットは、HIKReachActorChestId プロパティがターゲット キャラクタに対してゼロ以外の値に設定されたときにのみ使用されます。
HIKChestTOffsetZId
デフォルトでは、ChestEndEffectorId は、キャラクタがデフォルトの T スタンスで立っているときに LeftShoulderNodeId と RightShoulderNodeId の位置の中間にあるスケルトン上の仮想のポイントをコントロールします。このパラメータは、Z 軸に沿ってこの仮想のポイントにオフセットを適用します。
リターゲット時に、このオフセットは、HIKReachActorChestId プロパティがターゲット キャラクタに対してゼロ以外の値に設定されたときにのみ使用されます。これは肩の重心に影響し、ソース キャラクタと宛先キャラクタの肩が一致しないときに、より現実的なリターゲットを可能にします。
 特に明記されている場合以外は、この作業は、Creative Commons 表示 - 非営利 - 継承 3.0 非移植ライセンス のもと認可を受けています。 Autodesk Creative Commons FAQ (英語版) を参照してください。
特に明記されている場合以外は、この作業は、Creative Commons 表示 - 非営利 - 継承 3.0 非移植ライセンス のもと認可を受けています。 Autodesk Creative Commons FAQ (英語版) を参照してください。