기본 T 자세
HumanIK 솔버가 캐릭터를 제어하려면 해당 캐릭터가 HumanIK 생체 역학 모델에 캐릭터 골격의 형상 및 비율에 대한 중요한 정보를 제공하는 기본 T 자세로 초기화되어야 합니다.
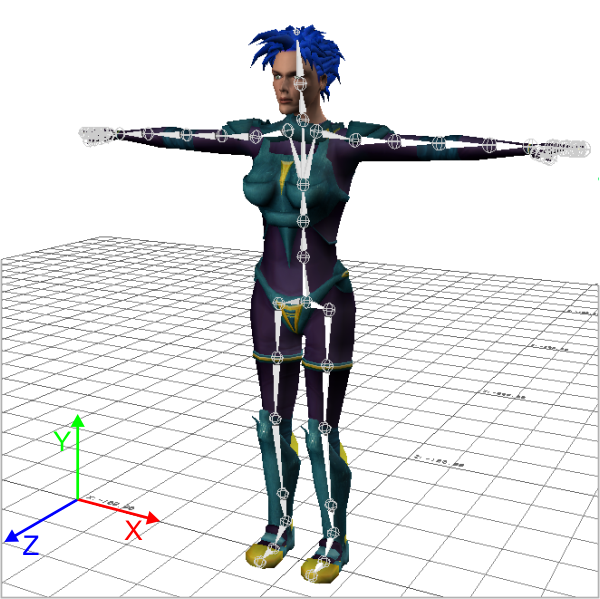
HumanIK 역운동학 및 대상 변경 솔버가 캐릭터에 대해 정확한 결과를 생성하려면 캐릭터의 T 자세가 아래 설명 및 예제와 최대한 비슷하게 일치해야 합니다. 올바르게 구성된 T 자세가 없으면 HumanIK 솔버는 잘못된 데이터를 기반으로 모든 작업을 진행하며 기울어지거나 어색하거나 예기치 못한 포즈를 생성할 수 있습니다.
- 캐릭터는 Z축의 양의 방향을 향해 있어야 합니다.
- 팔은 X축을 따라 펼쳐져 있어야 합니다. 따라서 왼쪽 팔은 X축의 양의 방향을 가리키고 있어야 합니다.
- 캐릭터 머리의 위쪽은 위로, 즉 Y축의 양의 방향으로 되어 있어야 합니다.
- 캐릭터의 손은 평평해야 하고 손바닥은 지면을 향하며 엄지손가락은 X축에 평행한 상태여야 합니다.
- 캐릭터의 발은 다리에 수직이거나(예: 아래 이미지에서 보이는 것처럼 발가락이 Z축을 향함) 다리 방향으로 쭉 뻗어 있을 수 있습니다(예: 발가락이 곧장 아래를 향함). 발은 Y축을 따라 회전할 수 없습니다. 예를 들어 왼쪽 발의 발가락이 오른쪽 다리 방향의 안쪽으로 향해 있거나 오른쪽 다리에서 바깥쪽으로 향해 있지 않아야 하며, 그 반대의 경우도 마찬가지입니다.
네 발 달린 동물
HumanIK는 런타임 시 Biped뿐 아니라 네 발 달린 동물을 제어하는 데 사용할 수 있습니다. 네 발 달린 동물 캐릭터에 대한 특성을 만드는 경우 위에 나오는 동일한 T 자세로 캐릭터의 골격을 설정해야 합니다. 네 발 달린 동물의 경우 Biped T 자세가 분명히 어색하고 불안정하지만 HumanIK가 캐릭터 골격의 형상 및 비율을 올바르게 설정할 수 있으려면 이 Biped 자세로 캐릭터를 설정해야 합니다.
T 자세 설정
캐릭터를 캐릭터화하기 위해 선택하는 방법에 따라 다른 방식으로 HumanIK에 이 T 자세를 제공합니다.
- 캐릭터를 프로그래밍 방식으로 만드는 경우 위에 나오는 T 자세를 반영하는 변환, 회전 및 배율 조정 값을 사용하여 초기화 코드에서 캐릭터의 각 노드를 설정해야 합니다. 이 프로세스에 대한 자세한 내용은 프로그래밍 방식으로 HIKCharacter 캐릭터화을(를) 참조하십시오.
- Characterization Tool을 사용하여 캐릭터화를 만드는 경우 캐릭터의 기본 T 자세는 HumanIK 노드에 매핑하는 골격의 변환, 회전 및 배율 조정에서 파생됩니다. Characterization Tool에서 내보낸 캐릭터화 파일의 내용에서 HIKCharacter를 만든 후에는 T 자세를 변경할 수 없습니다.
시각적으로 HIKCharacter 캐릭터화을(를) 참조하십시오. Characterization Tool을 사용하는 방법에 대한 자세한 내용은 도구에 함께 제공되는 설명서를 참조하십시오.
T 자세 검색
각 HIKCharacter는 자체 기본 T 자세의 기록을 보관합니다. HIKGetDefaultState() 함수를 호출하여 언제라도 이 T 자세를 검색할 수 있습니다.
 다른 설명이 없는 한, 이 저작물은 크리에이티브 커먼즈 저작자표시-비영리-동일조건변경허락 3.0 Unported 라이선스에 따라 이용할 수 있습니다.자세한 내용은 Autodesk 크리에이티브 커먼즈 FAQ (영문)를 참조하십시오.
다른 설명이 없는 한, 이 저작물은 크리에이티브 커먼즈 저작자표시-비영리-동일조건변경허락 3.0 Unported 라이선스에 따라 이용할 수 있습니다.자세한 내용은 Autodesk 크리에이티브 커먼즈 FAQ (영문)를 참조하십시오.