개와 늑대 캐릭터화
개와 늑대는 개과에 속하는 종류이며 여우, 자칼 및 코요테도 마찬가지입니다.
이 페이지에서는 HumanIK에서 사용할 수 있도록 개과 동물의 골격을 캐릭터화하는 방법에 대한 몇 가지 제안 사항을 제공합니다. 개과 동물의 골격은 여러 가지 방법으로 캐릭터화할 수 있습니다. 다음 제안 사항은 사용자가 직접 만든 캐릭터에 사용하기에 적합할 수도 있고 적합하지 않을 수도 있습니다.
네 발 달린 동물 예제
이 페이지의 제안 사항에 대한 작업 데모를 보려면 HumanIK SDK에 포함된 Quadrupeds 예제를 실행하십시오. <HumanIK_installation_folder>/solutions/<platform_and_toolset>의 HIKSamples.sln 솔루션은 샘플의 소스 코드 및 프로젝트를 통합합니다. 자세한 내용은 HumanIK 샘플을(를) 참조하십시오.
<HumanIK_installation_folder>/data/molecule/scenes의 Quadrupeds.fbx 파일도 참조하십시오.
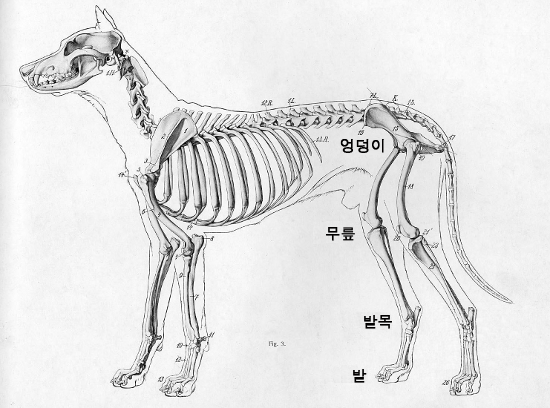
뒷다리
골격 매핑
늑대 또는 기타 개과 동물의 뒷다리에서 위쪽 관절 매핑은 간단합니다. 늑대는 발가락 끝으로 걸어다니기 때문에 아래쪽 관절 매핑이 약간 더 까다롭습니다.
- 개의 무릎은 LeftAnkleNodeId 및 RightAnkleNodeId에 매핑되어야 합니다.
- 발바닥의 방향을 제어하는 체인의 마지막 관절은 LeftFootNodeId 및 RightFootNodeId에 매핑되어야 합니다.
- 위에서 설명한 관절 사이에 있는 골격의 모든 관절은 노드에 매핑되면 안 됩니다.
기타 권장 사항
IK 솔버에서 뒷다리에 대해 생성한 포즈의 일반적인 느낌을 향상시키려면 일반적으로 뒷다리가 IK 해석 중 전체 확장으로 열리지 않도록 하는 것이 가장 좋습니다. 이렇게 하려면 캐릭터의 HIKPropertySetState에서 다리의 최대 확장을 더 작은 값으로 줄일 수 있습니다. 일반적으로 늑대에 적합한 값은 약 170도입니다.
HIKSetPropertyValue(props, HIKLeftLegMaxExtensionAngle, 170.0f); HIKSetPropertyValue(props, HIKRightLegMaxExtensionAngle, 170.0f);
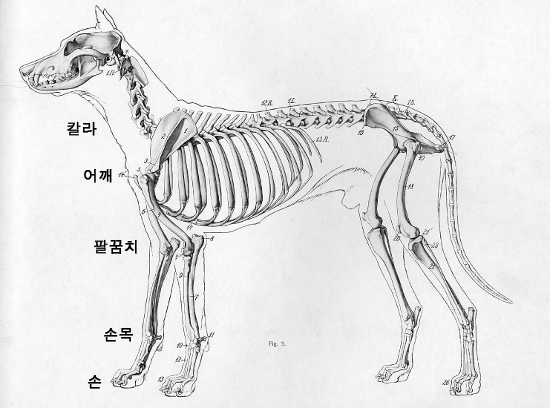
앞다리
골격 매핑
늑대 또는 기타 개과 동물의 앞다리 매핑은 아래 템플릿을 따를 경우 매우 간단합니다.
- 앞다리의 상부 관절은 일반적으로 지면 위 매우 높은 지점에 있습니다.
- 관절을 LeftCollarNodeId 및 RightCollarNodeId에 매핑하는 것은 선택 사항입니다. Quadrupeds 예제의 늑대 캐릭터에는 칼라 노드가 있지만 직접 만든 캐릭터에는 없을 수 있습니다.
기타 권장 사항
늑대 앞다리의 상부 관절은 지면에서 매우 높은 지점에 있으므로 최대 확장을 120°에서 150° 사이의 값으로 제한하는 것이 좋을 수 있습니다. 그러면 대상에 도달할 때 앞다리가 너무 많이 직선으로 펴지지 않도록 할 수 있습니다.
HIKSetPropertyValue(props, HIKLeftArmMaxExtensionAngle, 140.0f); HIKSetPropertyValue(props, HIKRightArmMaxExtensionAngle, 140.0f);
 다른 설명이 없는 한, 이 저작물은 크리에이티브 커먼즈 저작자표시-비영리-동일조건변경허락 3.0 Unported 라이선스에 따라 이용할 수 있습니다.자세한 내용은 Autodesk 크리에이티브 커먼즈 FAQ (영문)를 참조하십시오.
다른 설명이 없는 한, 이 저작물은 크리에이티브 커먼즈 저작자표시-비영리-동일조건변경허락 3.0 Unported 라이선스에 따라 이용할 수 있습니다.자세한 내용은 Autodesk 크리에이티브 커먼즈 FAQ (영문)를 참조하십시오.