Nun müssen Sie sicherstellen, dass die Vorderräder geschwenkt bzw. seitlich gedreht werden, wenn sich das Auto entlang des Animationspfads nach links oder rechts bewegt. Um eine realistischere Darstellung zu erhalten, werden Sie außerdem eine Beziehung zwischen dem Schwenken der Räder und der Drehung des Lenkrades herstellen.
Vorbereiten der Lektion:
- Fahren Sie mit dem Ergebnis der letzten Lektion fort, oder
 öffnen Sie die Datei
car_rig_04.max.
öffnen Sie die Datei
car_rig_04.max.
Einrichten von Helfern für die Vorderräder:
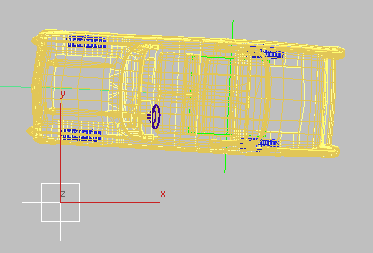
 Vergrößern Sie im Ansichtsfenster "Oben" das Auto, und drücken Sie die Taste F3, um in den Drahtgitter-Modus zu wechseln.
Vergrößern Sie im Ansichtsfenster "Oben" das Auto, und drücken Sie die Taste F3, um in den Drahtgitter-Modus zu wechseln. - Wählen Sie im Hauptmenü "Erstellen"
 "Helfer" "Punkt".
"Helfer" "Punkt". - Klicken Sie auf eine beliebige Stelle in der Nähe der Karosserie, um den Helfer zu erstellen. Aktivieren Sie im Rollout "Parameter" die Option "Feld", und geben Sie im Feld "Größe" 50,0 ein. Nennen Sie den Helfer Dummy_FL.
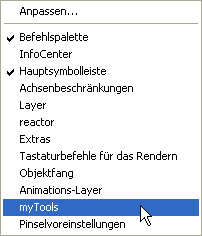
- Klicken Sie, während der Helfer noch ausgewählt ist, auf die Schaltfläche "ListCon" im Werkzeugkasten "myTools", die Sie zu einem früheren Zeitpunkt in diesem Lehrgang erstellt haben.
Das "ListCon"-Skript weist automatisch die beiden Controller "Positionsliste" und "Rotationsliste" zu, die Sie zuvor eingerichtet haben, was Ihnen ermöglicht, die Kontrolle über die lokale Ausrichtung des Helfers zu behalten.
Falls der Werkzeugkasten "myTools" derzeit nicht angezeigt wird, klicken Sie mit der rechten Maustaste in einen leeren Bereich im Hauptwerkzeugkasten, und wählen Sie im Menü "myTools".
- Klicken Sie im Hauptwerkzeugkasten auf
 (Ausrichten), und klicken Sie im Ansichtsfenster "Oben" auf das Objekt Chassis.
(Ausrichten), und klicken Sie im Ansichtsfenster "Oben" auf das Objekt Chassis. - Deaktivieren Sie im Dialogfeld "Auswahl ausrichten" Bereich "Position ausrichten" die Optionen "X-Position", "Y-Position" und "Z-Position". Aktivieren Sie im Bereich "Ausrichtung angleichen" die Optionen "X-Achse", "Y-Achse" und "Z-Achse".
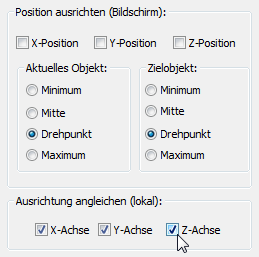
Diese Einstellungen stellen sicher, dass das Auto und der Helfer dieselbe Ausrichtung besitzen.
- Klicken Sie auf "OK", um das Dialogfeld zu schließen.
- Aktivieren Sie
 (Auswählen und verschieben). Verwenden Sie UMSCHALTTASTE+ Verschieben, um eine Kopie des neuen Helfers zu erstellen. Tipp: Legen Sie für das Koordinatensystem "Lokal" fest, um das Verschieben des Punkthelfers zu erleichtern.
(Auswählen und verschieben). Verwenden Sie UMSCHALTTASTE+ Verschieben, um eine Kopie des neuen Helfers zu erstellen. Tipp: Legen Sie für das Koordinatensystem "Lokal" fest, um das Verschieben des Punkthelfers zu erleichtern. - Geben Sie der Kopie im Dialogfeld "Klonoptionen" den Namen Dummy_FR.
Als Nächstes richten Sie den Helfer am rechten Vorderrad aus.
 Wählen Sie im Ansichtsfenster "Oben" das Objekt Chassis aus, klicken Sie dann mit der rechten Maustaste und wählen Sie "Auswahl ausblenden".
Wählen Sie im Ansichtsfenster "Oben" das Objekt Chassis aus, klicken Sie dann mit der rechten Maustaste und wählen Sie "Auswahl ausblenden". - Wählen Sie den neuen Punkthelfer aus. Klicken Sie im Hauptwerkzeugkasten auf (Ausrichten) und dann auf Wheel_FR.
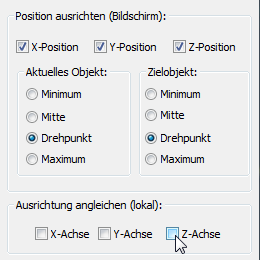
- Aktivieren Sie im Dialogfeld "Auswahl ausrichten" Bereich "Position ausrichten" die Optionen "X-Position", "Y-Position" und "Z-Position".
Stellen Sie sicher, dass in Bereichen "Aktuelles Objekt" und "Zielobjekt" die Option "Drehpunkt" ausgewählt wurde.
Deaktivieren Sie im Bereich "Ausrichtung angleichen" die Optionen "X-Achse", "Y-Achse" und "Z-Achse".
- Klicken Sie auf "Anwenden" und danach auf "OK", um das Dialogfeld zu schließen.
- Wählen Sie Dummy_FL. Klicken Sie erneut auf (Ausrichten). Klicken Sie im Ansichtsfenster "Oben" auf Wheel_FL.
- Wiederholen Sie die Schritte 12 und 13, um den Helfer auf das linke Vorderrad auszurichten.
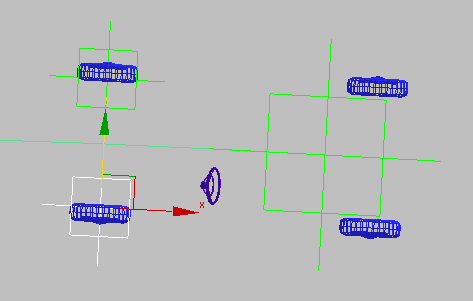
Auf das linke und das rechte Vorderrad ausgerichtete Punkthelfer
Sie werden nun die Hierarchie und die Beziehungen zwischen über- und untergeordneten Elementen des Autos nachbearbeiten, sodass Sie die Räder drehen (einschlagen) können. Diese Schritte dienen auch als Vorbereitung auf die dynamische Radlastverteilung, die in der nächsten Lektion manipuliert werden soll.
Auf dieselbe Weise, wie Sie einen Punkthelfer erstellt haben, um die Autoanimation an einem Pfad entlangzuführen, werden Sie zwei weitere Punkthelfer erstellen, um die Schwenkung der Vorderräder zu steuern, wenn diese durch die Drehung des Lenkrades angetrieben werden.
Verknüpfen der Rad-Helfer mit dem Auto-Helfer:
- Klicken Sie im Hauptwerkzeugkasten auf
 (Auswählen und verknüpfen).
(Auswählen und verknüpfen). - Wählen Sie die beiden Rad-Helferobjekte bei gedrückter STRG-Taste aus, und ziehen Sie dann zum Objekt Dummy_CAR.
Dadurch werden die Helfer als untergeordnete Objekte des Objekts Dummy_CAR verknüpft.
Verknüpfen der Hinterräder mit dem Auto-Helfer:
- Wählen Sie, während das Hilfsmittel
 (Auswählen und verknüpfen) noch aktiviert ist, beide Hinterräder (Wheel-RL und Wheel-RR) aus, und ziehen Sie zum Helfer Dummy_CAR.
(Auswählen und verknüpfen) noch aktiviert ist, beide Hinterräder (Wheel-RL und Wheel-RR) aus, und ziehen Sie zum Helfer Dummy_CAR.
Verknüpfen der vorderen Helfer mit den zugehörigen Rädern:
- Verknüpfen Sie das linke Vorderrad (Wheel-FL) mit dem Helfer Dummy_FL.
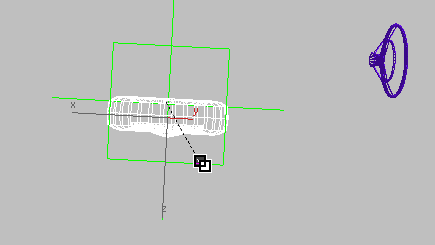
Verknüpfen des linken Vorderrades mit dem Helfer für das linke Vorderrad
- Verknüpfen Sie das rechte Vorderrad (Wheel-FR) mit dem Helfer Dummy_FR.
- Klicken Sie auf
 (Objekt auswählen), um es zu aktivieren, und deaktivieren Sie "Auswählen und verknüpfen".
(Objekt auswählen), um es zu aktivieren, und deaktivieren Sie "Auswählen und verknüpfen".
Die Karosserie wieder einblenden:
- Klicken Sie mit der rechten Maustaste in das Ansichtsfenster, und wählen Sie im Quad-Menü die Option "Nach Namen einblenden". Wählen Sie im Dialogfeld "Aus Szene auswählen" Chassis, und klicken Sie dann auf "Einblenden".
Die Räder drehen (in Welt-X-Koordinaten):
- Klicken Sie auf die Ansichtsfenster-Beschriftung "Camera_Wall-E", und wählen Sie im Menü die Option "Kameras" "Camera_Birdseye" aus.
- Klicken Sie im Hauptwerkzeugkasten auf die Schaltfläche (Auswählen), um sie zu aktivieren.
- Wählen Sie im Kamera-Ansichtsfenster das Lenkrad (SWheel) aus.
- Klicken Sie mit der rechten Maustaste auf das Lenkrad, und wählen Sie die Option "Vernetzungsparameter".
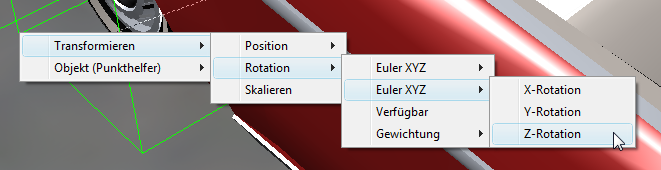
- Wählen Sie im Menü die Option "Transformieren" "Drehung" "(2.) Euler-XYZ" "Z-Rotation".
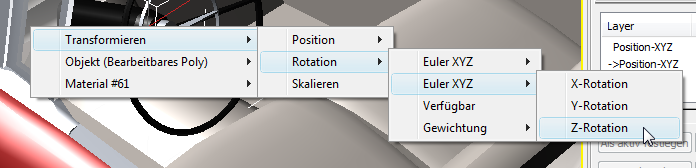
- Klicken Sie auf das Objekt Dummy-FL, bei dem es sich um den Helfer für das linke Vorderrad handelt, und wählen Sie "Transformieren" "Drehung" "(2.) Euler-XYZ" "Z-Rotation".
- Legen Sie im Dialogfeld "Parametervernetzung" für die Steuerungsrichtung beide Richtungen fest, da sich das manuelle Drehen eines der Objekte auf das andere Objekt auswirkt.
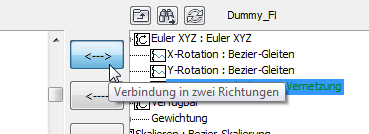
- Klicken Sie auf "Verbinden", und lassen Sie das Dialogfeld "Parametervernetzung" geöffnet.
 Aktivieren Sie im Hauptwerkzeugkasten "Auswählen und drehen", und legen Sie für das Koordinatensystem "Lokal" fest.
Aktivieren Sie im Hauptwerkzeugkasten "Auswählen und drehen", und legen Sie für das Koordinatensystem "Lokal" fest. 
- Drehen Sie das Lenkrad auf seiner lokalen Z-Achse.
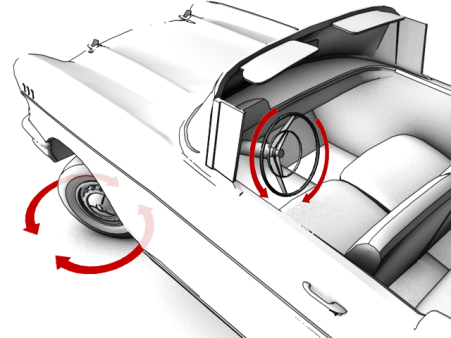
Sie werden sehen, dass sich das Lenkrad und das Vorderrad in entgegengesetzte Richtungen drehen. Dies werden Sie durch eine Änderung des Controller-Ausdrucks korrigieren. Außerdem ist noch eine zweite Anpassung erforderlich. Das Vorderrad muss um einen viel geringeren Betrag gedreht werden als das Lenkrad. Dies liegt daran, dass der Schwenkbereich eines Vorderrades etwa 90 Grad beträgt, während der Bewegungsbereich eines Lenkrades zwei oder drei vollständige Umdrehungen umfasst.

Das Lenkrad und das Vorderrad drehen sich in entgegengesetzte Richtungen
- Brechen Sie die Drehung, die Sie im vorherigen Schritt ausgeführt haben, ab, bzw.
 machen Sie sie rückgängig.
machen Sie sie rückgängig. - Geben Sie im linken Ausdrucksfenster unter "Ausdruck für SWheel's Z_Rotation" Folgendes ein: -Z_Rotation*8.
- Geben Sie im rechten Fenster unter "Ausdruck für Dummy_FL's Z_Rotation" Folgendes ein: -Z_Rotation/8.
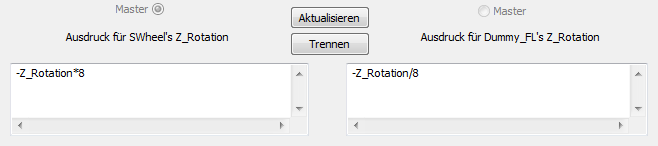
Das Minuszeichen (-) stellt sicher, dass die beiden Drehungen in dieselbe Richtung erfolgen, und die Faktoren "*8" und "/8" sorgen dafür, dass der Winkel, den das linke Vorderrad eingeschlagen (in Z gedreht) wird, nur ein Achtel der Drehung des Lenkrades ausmacht.
- Klicken Sie auf "Aktualisieren", und testen Sie Ihre Arbeit, indem Sie das Lenkrad erneut auf seiner lokalen Z-Achse drehen.
Sie werden sehen, dass das Verhalten jetzt realistischer ist.
- Wiederholen Sie die Schritte 4 bis 14, um das Lenkrad und den Helfer des rechten Vorderrades zu vernetzen. (Sie können mit H den Helfer des rechten Vorderrads auswählen.)
Stellen Sie sicher, dass Sie genau dieselben Ausdrücke angeben wie in den Schritten 13 und 14, da der Helfer für das rechte Vorderrad eine Kopie und keine Spiegelung des Helfers für das linke Vorderrad ist.
Sie können die Auswirkung der Vernetzung des rechten Vorderrads im Ansichtsfenster "Oben" verfolgen.
-
 Schließen Sie die Dialogfelder für die Parametervernetzung.
Schließen Sie die Dialogfelder für die Parametervernetzung.
Animieren der Steuerung:
- Falls Ihre Zeitlinie in Frames und Unterteilungen angezeigt wird, klicken Sie auf die Schaltfläche
 (Zeitkonfiguration), und wählen Sie im Dialogfeld "Zeitkonfiguration" Bereich "Zeitanzeige" die Option "Frames".
(Zeitkonfiguration), und wählen Sie im Dialogfeld "Zeitkonfiguration" Bereich "Zeitanzeige" die Option "Frames". 
- Aktivieren Sie die Ansicht "Oben", drücken Sie F3, um wieder zum Modus "Realistisch" zu wechseln, und klicken Sie dann auf
 (Zoom Grenzen), um den gesamten Animationspfad anzuzeigen.
(Zoom Grenzen), um den gesamten Animationspfad anzuzeigen. - Gehen Sie zu Frame 50, der Stelle, wo das Auto sich in der Mitte seiner ersten Kurve befindet.
- Wählen Sie SWheel aus, und klicken Sie im Hauptwerkzeugkasten auf (Auswählen und drehen).
- Aktivieren Sie
 , und drehen Sie das Lenkrad, bis in der Statusleiste der Z-Achse der Wert "-280" angezeigt wird.
, und drehen Sie das Lenkrad, bis in der Statusleiste der Z-Achse der Wert "-280" angezeigt wird. 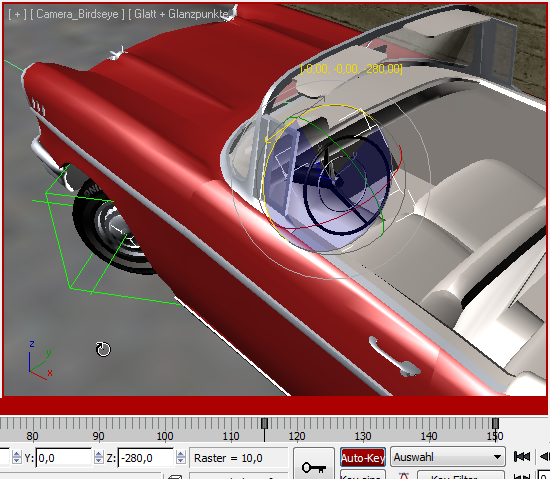
Lenkraddrehung mit -280 Grad um die Z-Achse
- Gehen Sie zu Frame 115, der Stelle, an der sich das Auto in der Mitte der zweiten Kurve befindet, und drehen Sie das Lenkrad, bis in der Statusleiste der Z-Achse der Wert "500" angezeigt wird.
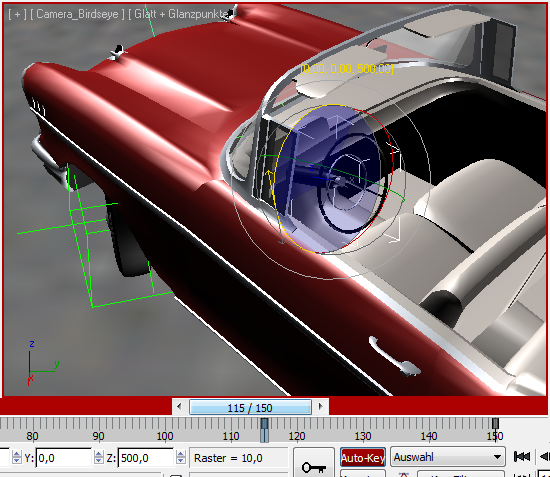
Lenkraddrehung um 500 Grad um die Z-Achse
- Gehen Sie zum
 Ende der Animation, und drehen Sie das Lenkrad, bis in der Statusleiste der Z-Achse der Wert "-220" angezeigt wird.
Ende der Animation, und drehen Sie das Lenkrad, bis in der Statusleiste der Z-Achse der Wert "-220" angezeigt wird. - Deaktivieren Sie
 , und testen Sie Ihre Animation.
, und testen Sie Ihre Animation. - Speichern Sie die Datei unter dem Namen mycar_rig_05.max.