Vous définissez le comportement d'une connexion (charnière, glissière d'un tiroir ou autre type de connexion) en définissant les paramètres de connexion de chaque objet de la chaîne cinématique. Une connexion permet de contrôler la rotation et la position d'un objet par rapport à son parent.
Tout objet comporte un maximum de deux groupes de fonctions ayant trait au type de connexion : l'un contenant les paramètres de contrôle de la position de l'objet et l'autre contrôlant sa rotation. Il peut y avoir un grand nombre de types de connexions définissant la position et la rotation d'un objet. Les paramètres de connexion disponibles dépendent du type de solution CI affectée à un objet. Les solutions IH, par exemple, sont contrôlées par un paramètre d'angle préféré inclus dans les paramètres de connexion de rotation. Les solutions DH ont, quant à elles, des paramètres de ressort arrière, de priorité et d'amortissement non disponibles dans la solution IH.
Vous pouvez définir des limites de connexion pour toute hiérarchie d'objets ou tout système de structures. Sélectionnez tous les objets et activez l'affichage de leur structure ou de leur lien. Sélectionnez la structure ou le lien et ouvrez le groupe de fonctions Hiérarchie  onglet CI. Faites défiler le panneau déroulant jusqu'à l'option de connexion en translation et de rotation. Vous pouvez alors activer les axes et définir leurs limites individuelles.
onglet CI. Faites défiler le panneau déroulant jusqu'à l'option de connexion en translation et de rotation. Vous pouvez alors activer les axes et définir leurs limites individuelles.
Types de connexions courants
Les types de connexions les plus courants sont les connexions de rotation et les connexions en translation. D'autres types de connexions courants sont les connexions sur trajectoire et de surface. A chaque type de connexion correspondent des paramètres spécifiques.
- Connexions de rotation
-
Définissent la rotation des objets en utilisant divers contrôleurs de rotation standard. Les paramètres des connexions de rotation définissent la faculté d'un objet à pivoter autour d'un axe donné.
Pour la plupart des structures CI, nous vous conseillons d'utiliser un contrôleur Euler XYZ. Les contrôleurs quaternioniques ont tendance à geler le mouvement si une rotation supérieure aux limites de rotation de la connexion est appliquée à l'objet avant que la cinématique inverse ne soit activée.
- Connexions de translation
-
Définissent la position des objets au moyen de nombreux contrôleurs de position standard. Les paramètres des connexions en translation déterminent si un objet peut se déplacer le long d'un axe donné.
- Connexions de surface
-
Définissent la position des objets en utilisant une contrainte Surface. Ces paramètres déterminent comment l'objet se déplace à la surface qui lui est affectée.
- Connexions de trajectoire
-
Définissent l'animation positionnelle des objets en utilisant une contrainte Trajectoire. Les paramètres des connexions sur trajectoire déterminent si un objet peut se déplacer le long de la trajectoire qui lui a été attribuée.
Utilisation des paramètres de connexion
Le comportement des enfants entre eux est gouverné par l'héritage des transformations le long de la chaîne. La définition de limites de connexion sur des objets enfants individuels peut influencer cet héritage. Si trois enfants consécutifs ont tous des axes de rotation inactifs, ils ne pourront pas pivoter et cette partie de la chaîne apparaîtra donc rigide. De même, si un seul axe est activé en tant que connexion en translation, le composant peut alors se séparer de la chaîne dans l'espace.
Lorsque vous utilisez un objet doté d'une contrainte Trajectoire dans une chaîne CI, il peut être utile de faire apparaître la trajectoire comme si elle faisait partie de la chaîne CI. Pour obtenir cet effet, vous devez lier l'objet utilisant la contrainte Trajectoire et son objet trajectoire au même parent. L'objet trajectoire ne doit pas avoir d'enfants, et les autres objets de la chaîne CI doivent être liés à l'objet utilisant la contrainte Trajectoire.
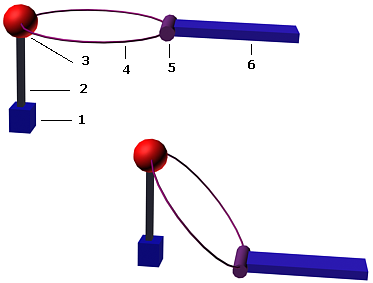
1. Base
2. Poteau
3. Couvercle
4. Anneau
5. Emplacement
6. Poignée
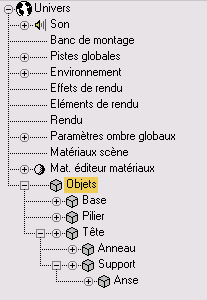
Dans la figure, la bille utilise une contrainte Trajectoire pour la lier à l'anneau. La chaîne CI de parent à enfant est Pilier->Tête->Bille->Anse. L'anneau est un enfant de Tête, mais n'est pas intégré à la chaîne CI.
Copie et collage des paramètres de connexion
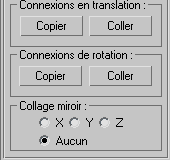
Vous pouvez vous servir des boutons Copier et Coller placés au bas du panneau déroulant Paramètres d'objet du groupe de fonctions Hiérarchie pour copier et coller un jeu complet de paramètres de connexion entre deux objets.
Il existe des boutons Copier et Coller distincts pour les connexions en translation et les connexions de rotation. Chaque type de connexion enregistre les paramètres copiés dans des presse-papiers différents.
Vous pouvez également copier les paramètres de connexion d'un contrôleur non-CI à un contrôleur CI, mais l'inverse est interdit.